DW-ссылка - DW-link
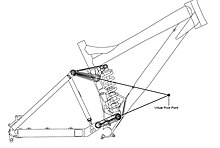
В DW-ссылка представляет собой подмножество общей системы с четырьмя стержнями, широко используемой в подвеска велосипеда. Система с четырьмя стержнями использовалась на горных велосипедах с первых дней существования подвески. Подобные системы подвески DW-link использовались Schwinn, Fisher и Karpiel. В настоящее время подобная система используется Giant и носит название «Маэстро». DW-link получил свое название от дизайнера и патентообладателя, инженера-механика Дэйва Уигла.[1] В настоящее время лицензия DW-link предоставлена следующим велосипедным компаниям: Циклы PIVOT, Ибис, Независимое изготовление, Велосипеды Turner Suspension, и Велосипеды Iron Horse.[1] Конструкция подвески DW-link использовалась для победы на шести чемпионатах мира по скоростному спуску UCI уровня Elite с 2005 по 2007 год, что является высшим соревновательным уровнем в этом виде спорта. Эта победная серия сделала dw-link самой успешной платформой с рычажной подвеской в истории скоростного спуска.[2] Дэйв Уигл также разработал Подвеска Split Pivot и Delta System, которые используются в велоспорте.
В настоящее время конструкция Уигла имеет несколько патентов, в том числе US7128329,[3] который является первым в мире и остается единственным опубликованным отчетом о методе математических и геометрических характеристик цепной / ременной и приводной подвески мотоциклов и велосипедов. Модель 7128329 представила несколько новых концепций и измерений в мире подвески, в частности, концепцию характеристики анти-приседаний в виде кривой или площади на графике в зависимости от хода антиприседа и сжатия. Портфолио также предлагало те же базовые измерения для тормозного приседания в зависимости от расстояния сжатия. Эти измерения теперь принимаются некоторыми профессионалами в области динамики подвески транспортных средств как «кривые против приседаний» и «кривые при торможении».[4]
Разработка
Горный байкер-любитель Дэйв Уигл использовал свой опыт в четырехколесном мотоцикле. динамика подвески автомобиля исследовать траекторию оси рычагов подвески велосипеда. Метод анализа, который разработал Уигл, стал первым опубликованным текстом по анализу систем рычажной подвески для цепных ведомых колес. Исследования Уигла были направлены на то, что среди маунтинбайкеров известно как "подвеска боб. »Анализ показал, что« боб »был результатом комбинированного воздействия передача нагрузки во время разгона и неуравновешенных сил движения ног всадника вверх и вниз. Было понято, что использование антиприседаний может противодействовать передаче нагрузки и усилиям, вызванным педалированием, которые вызывают "боб подвески" и ограниченное сцепление.
Обзор
Велосипеды имеют короткую колесная база относительно высоты их центр массы по сравнению с другими транспортными средствами, такими как автомобили. Поскольку велосипеды вращаются педалями, их прямое ускорение имеет тенденцию быть резкими, когда каждая педаль находится под напряжением. Поскольку движущая сила на заднем колесе не совмещена с центром масс, велосипед испытывает крутящий момент, согласно Второй закон Эйлера. Этот крутящий момент частично отвечает за сжатие задней подвески под действием силы, известной как приседание. Приседания, возникающие во время вращения педалей, известны как «подвесной боб».
Подвеска боб имеет три основных причины:
- Смещение веса райдера из-за хода педали
- Натяжение цепи, действующее на подвеску
- Приседание или поддомкрачивание подвески из-за силы ускорения.
На велосипедах, подверженных качению, следующие два метода могут уменьшить его.
- Увеличить демпфирование сжатия приостановки
- Увеличить пружина приостановки
Однако ни одно из этих решений не является идеальным, поскольку они препятствуют способности подвески поглощать небольшие неровности или удары на низкой скорости, когда велосипед движется по инерции (Примечание: «низкая скорость» не относится к скорости, с которой движется транспортное средство, но скорость сжатия подвески). В случае чрезмерного демпфирования сжатия эта проблема известна как чрезмерное демпфирование.
DW-link использует конструкцию подвески, предотвращающую приседание, чтобы противодействовать силам, ответственным за «боб подвески», и, следовательно, устраняет необходимость в чрезмерном демпфировании сжатия. Это позволяет подвеске быть более активной при ударах на низкой скорости, обеспечивая большее сцепление с дорогой.
Механика
DW-link использует анти-приседания, чтобы устранить "подвесной боб". Приседание определяется как тенденция задней подвески сжиматься при ускорении. Защита от приседаний, используемая в системе DW-link, достигается за счет минимизации крутящего момента относительно центра масс. Система DW-link также была разработана для минимизации обратная связь педали вызвано ходом подвески.
Еще одно важное преимущество DW-link - отсутствие необходимости в плавающем тормозная система для достижения оптимальных характеристик подвески при торможении. Обычно на одиночный стержень системы подвески, при торможении без плавающего тормоза наблюдается большое количество приседаний.[5] Впоследствии подвеска становится менее активной при торможении, что снижает тягу.
Конструкция dw-link спроектирована так, чтобы сбалансировать эффекты ускорения и торможения, чтобы улучшить тягу и эффективность. В нем используется кинематическая сила подвески, называемая «чувствительный к положению антиподъемник». Когда автомобиль ускоряется, подвеска реагирует (обычно в форме сжатия подвески) на явление, называемое передача нагрузки.[6][7] Чувствительный к положению антиквот dw-link компенсирует передачу нагрузки назад, которая происходит во время ускорения автомобиля. Математически доказано, что этот уникальный атрибут снижает потери эффективности, улучшая тягу и чувствительность к ударам, и, если он правильно спроектирован, поможет минимизировать ощутимую обратную связь от педали по сравнению с другими методами достижения аналогичного смещения передачи нагрузки.[нужна цитата ]
Рекомендации
- ^ а б "DW-Link". Получено 2009-03-15.
- ^ "Международный союз велосипедистов". Получено 2009-03-31.
- ^ "Патентная база данных полных текстов и изображений USPTO: Патент США 7 128 329, Weagle, 31 октября 2006 г.". Получено 2009-07-29.
- ^ Фоул, Тони (2006). Управление мотоциклом и конструкция шасси (Второе изд.). Тони Фоул Дизайн. С. 9-15–9-20. ISBN 978-84-933286-3-4.
- ^ Фоул, Тони (2006). Управление мотоциклом и конструкция шасси (Второе изд.). Тони Фоул Дизайн. С. 9–25. ISBN 978-84-933286-3-4.
- ^ Фоул, Тони (2006). Управление мотоциклом и конструкция шасси (Второе изд.). Тони Фоул Дизайн. С. 9–1. ISBN 978-84-933286-3-4.
- ^ Cossalter, Витторе (2006). Динамика мотоцикла (Второе изд.). Lulu.com. С. 84–85. ISBN 978-1-4303-0861-4.