Дельта-робот - Delta robot - Wikipedia
Эта статья нужны дополнительные цитаты для проверка. (Октябрь 2009 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
А дельта-робот это тип параллельный робот[2] который состоит из трех рук, соединенных с универсальные шарниры на базе. Ключевой особенностью дизайна является использование параллелограммы в руках, что сохраняет ориентацию рабочий орган, в отличие от Платформа Стюарта который может изменить ориентацию своего конечного эффектора.[3]
Роботы Delta широко используются для сбора и упаковки на фабриках, потому что они могут быть довольно быстрыми, некоторые производят до 300 комплектов в минуту.[4]
История

Дельта-робот (робот с параллельными руками) был изобретен в начале 1980-х годов исследовательской группой под руководством профессора Реймонд Клавель на École Polytechnique Fédérale de Lausanne (EPFL, Швейцария).[5] После посещения производитель шоколада, член команды хотел разработать робота для размещения пралине в своих пакетах.[6] Цель этого нового типа роботов состояла в том, чтобы манипулировать легкими и небольшими объектами с очень высокой скоростью, что было промышленной потребностью в то время.
В 1987 году швейцарская компания Demaurex приобрела лицензию на дельта-робота и начала производство дельта-роботов для упаковочная промышленность. В 1991 году Реймонд Клавель представил свою докторскую диссертацию «Концепция быстрого параллельного робота на 4 степени свободы».[7] и получил награду «Золотой робот» в 1999 году за свою работу и разработку дельта-робота. Также в 1999 г. ABB Гибкая автоматизация начала продавать своего дельта-робота FlexPicker. К концу 1999 года дельта-роботы также продавались Sigpack Systems.
В 2017 году исследователи из Гарвард Лаборатория микроробототехники миниатюрный это с пьезоэлектрические приводы до 0,43 грамма для 15 мм x 15 мм x 20 мм, способный перемещать полезную нагрузку 1,3 грамма вокруг рабочего пространства 7 кубических миллиметров с точностью 5 микрометров, достигая скорости 0,45 м / с при ускорении 215 м / с² и повторяющихся шаблонах при 75 Гц .[8]
Дизайн


Дельта-робот - это параллельный робот, т.е. состоит из нескольких кинематические цепи соединение основания с рабочим органом. Робот также можно рассматривать как пространственное обобщение четырехзвенная навеска.[9]
Ключевой концепцией дельта-робота является использование параллелограммов, которые ограничивают движение конечной платформы чисто поступательным движением, то есть только движением в направлении X, Y или Z без вращения.
Основание робота монтируется над рабочим пространством и всем приводы расположены на нем. От основания отходят три средние шарнирные руки. Концы этих дужек соединены с небольшой треугольной площадкой. Приведение в действие входных звеньев перемещает треугольную платформу в направлении X, Y или Z. Срабатывание может быть выполнено с помощью линейный или поворотные приводы, с редукторами или без них (прямой привод ).
Поскольку все приводы расположены в основании, рычаги могут быть выполнены из легкого композитный материал. В результате движущиеся части дельта-робота имеют небольшой инерция. Это обеспечивает очень высокую скорость и высокую ускорения. Соединение всех рук вместе с рабочим органом увеличивает жесткость робота, но уменьшает его рабочий объем.
Версия, разработанная Реймонд Клавель имеет четыре степени свободы:[7] три перевода и одно вращение. В этом случае четвертая опора проходит от основания до середины треугольной платформы, предоставляя концевому эффектору четвертую степень свободы вращения вокруг вертикальной оси.
В настоящее время разработаны и другие версии дельта-робота:
- Дельта с 6 степенями свободы: разработка компании Fanuc, на котором серийная кинематика с 3 степенями свободы вращения размещена на концевом эффекторе
- Дельта с 4 степенями свободы: разработка компании Адепт, который имеет 4 параллелограмма, непосредственно соединенных с концевой платформой, вместо того, чтобы иметь четвертую ногу, идущую в середине рабочего органа
- Карманная Дельта: разработан швейцарской компанией Асырил С.А., 3-х осевая версия Delta Robot, адаптированная для гибких систем подачи деталей и других высокоскоростных и высокоточных приложений.
- Delta Direct Drive: робот Delta с 3 степенями свободы, двигатель которого напрямую соединен с руками. Ускорения могут быть очень высокими, от 30[10] до 100 грамм.
- Delta Cube: разработан EPFL университетская лаборатория LSRO, дельта-робот, построенный в монолитной конструкции, имеющий шарнирно-изгибные соединения. Этот робот адаптирован для сверхточных приложений.
- Было разработано несколько схем "линейный треугольник", в которых двигатели приводят в действие линейные приводы, а не вращают рычаг. Такие схемы с линейным треугольником могут иметь гораздо больший рабочий объем, чем устройства с поворотным треугольником.[11][12]
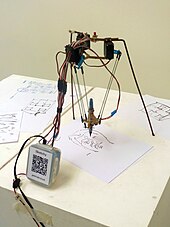
Большинство дельта-роботов используют поворотные приводы. Вертикальные линейные приводы недавно были использованы (с линейно-треугольной конструкцией) для создания новой конструкции 3д принтер.[13][14] Они предлагают преимущества перед обычными 3D-принтерами на винтовой основе, заключающиеся в более быстром доступе к большему объему сборки при сопоставимых инвестициях в оборудование.
Приложения

Эта секция нужны дополнительные цитаты для проверка. (Июль 2012 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
Отрасли, которые используют преимущества высокой скорости дельта-роботов, - это упаковочная промышленность, медицинская и фармацевтическая промышленность. Из-за жесткости он также используется в хирургии. Другие приложения включают операции высокоточной сборки в чистая комната для электронных компонентов.Конструкция дельта-робота также может использоваться для создания тактильный контроллеры.[16] Совсем недавно технология была адаптирована для 3D принтеры. Эти принтеры быстрее и могут быть построены примерно за 200 долларов и хорошо конкурируют с традиционными декартовыми принтерами.
Рекомендации
- ^ «Скетч, самодельный робот-рисовальщик». Джаркман.
- ^ Бонев И. (2001) Дельта-параллельный робот - история успеха, онлайн-статья доступна по адресу http://www.parallemic.org/Reviews/Review002.html
- ^ Бонев И. Истинное происхождение параллельных роботов. Онлайн-статья доступна по адресу http://www.parallemic.org/Reviews/Review007.html
- ^ http://www.botjunkie.com/2009/11/03/adept-quattro-is-fastest-ever-for-the-moment/
- ^ США 4976582
- ^ Лор-Анн Пессина (7 марта 2012 г.). «Реймонд Клавель, создатель Delta Robot, размышляет о своей карьере». EPFL.
- ^ а б Клавель, Р. (1991) Концепция робота Parallèle Rapide на 4 степени свободы. Докторская диссертация, EPFL, Лозанна, Швейцария
- ^ Эван Акерман (17 января 2018 г.). «Робот MilliDelta из Гарварда - маленький и очень быстрый». IEEE Спектр.
- ^ Мерле, Ж.-П., Параллельные роботы, Kluwer Academic Publishers, 2000.
- ^ Миллер, К., "Моделирование динамики и модельное управление параллельным роботом DELTA с прямым приводом", Журнал робототехники и мехатроники, Vol. 17, No. 4, pp. 344-352, 1995.
- ^ «Галерея роботов - проф. Реймонд Клавель»
- ^ Реймонд КЛАВЕЛ."Параллели роботов"
- ^ Иоганн Рохолл (6 февраля 2012 г.). «Росток (дельта-робот 3D-принтер)». Thingiverse.
- ^ Майк Щис (13 июля 2012 г.). «3D-печать с дельта-роботом, который, кажется, упрощает концепцию».
- ^ "Hoosier Daddy - самый большой 3D-принтер Delta в мире". Мир 3D-принтеров. Punchbowl Media. 23 июля 2014 г. Архивировано с оригинал 26 октября 2014 г.. Получено 28 сентября 2014.
- ^ Санни Бейнс (8 августа 2007 г.). «Ощущение виртуальных миров».