Пропорциональная навигация - Proportional navigation
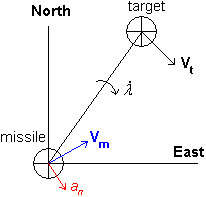
Пропорциональная навигация (также известен как PN или же Pro-Nav) это закон руководства (аналогично пропорциональное управление ) используется в той или иной форме большинством самонаводящихся воздушных целей ракеты.[1] Он основан на том, что две машины находятся на траектория столкновения когда их прямые Поле зрения не меняет направление при закрытии диапазона. PN диктует, что вектор скорости ракеты должен вращаться со скоростью, пропорциональной скорости вращения линии визирования (скорость прямой видимости или LOS-скорость), и в том же направлении.

Где - ускорение, перпендикулярное вектору мгновенной скорости ракеты, - константа пропорциональности, обычно имеющая целое значение 3-5 (безразмерная), - скорость прямой видимости, а V - скорость приближения.



Поскольку линия визирования, как правило, не совпадает с вектором скорости ракеты, приложенное ускорение не обязательно сохраняет кинетическую энергию ракеты. На практике, при отсутствии возможности дросселирования двигателя, этот тип управления может быть невозможен.
Пропорциональная навигация также может быть достигнута с помощью ускорения, нормального к мгновенной разнице скоростей:

куда это вектор вращения прямой видимости:


и - скорость цели относительно ракеты и расстояние от ракеты до цели. Это ускорение явно зависит от вектора разности скоростей, что может быть трудно получить на практике. Напротив, в следующих выражениях зависимость зависит только от изменения луча зрения и величины скорости приближения. Если требуется ускорение, перпендикулярное мгновенному направлению прямой видимости (как в начальном описании), то справедливо следующее выражение:



Если требуется управление с сохранением энергии (как в случае с использованием только управляющих поверхностей), может использоваться следующее ускорение, ортогональное скорости ракеты:

Довольно простую аппаратную реализацию этого закона наведения можно найти в AIM-9 Сайдвиндер ракеты. Эти ракеты используют быстро вращающийся параболическое зеркало как ищущий. Простая электроника обнаруживает ошибку направления искателя относительно цели ( ИК источник), и приложите момент к этому подвесному зеркалу, чтобы оно оставалось направленным на цель. Поскольку зеркало на самом деле гироскоп он будет продолжать указывать в одном направлении, если не будет приложена внешняя сила или момент, независимо от движения ракеты. В Напряжение применяется к зеркалу, удерживая его на цели, затем также используется (хотя и с усилением) для отклонения управляющих поверхностей, управляющих ракетой, тем самым делая вращение вектора скорости ракеты пропорциональным повороту на линии визирования. Хотя это не приводит к скорости вращения, которая всегда точно пропорциональна скорости LOS (что потребовало бы постоянной воздушной скорости), такая реализация также эффективна.
Основы пропорциональной навигации были впервые обнаружены в море и использовались мореплавателями на кораблях для избегать столкновения. Обычно упоминается как Постоянно уменьшающийся диапазон подшипников (CBDR), эта концепция по-прежнему оказывается очень полезной для боевых офицеров (лица, контролирующего управление судном в любой момент времени), поскольку CBDR приведет к столкновению или близкому отсутствию действий, если одно из двух судов не предпримет никаких действий. участвует. Простое изменение курса до тех пор, пока не произойдет изменение пеленга (полученного путем наведения на компас), обеспечит некоторую уверенность в предотвращении столкновения, очевидно, не надежную: командир судна, изменивший курс, должен постоянно контролировать пеленг, чтобы другое судно не сбилось с пути. одно и тоже. Существенное изменение курса, а не скромное изменение, разумно. Международные правила предотвращения столкновений судов в море диктуют, какое судно должно уступить дорогу, но они, конечно, не дают никаких гарантий того, что это судно предпримет действия.
Смотрите также
Библиография
- Янушевский, Рафаэль. Современное ракетное наведение. CRC Press, 2007. ISBN 978-1420062267.
Рекомендации
- ^ Янушевского, стр.3.