Математическое обсуждение выгула - Mathematical discussion of rangekeeping - Wikipedia
В морской артиллерии, когда стали доступны дальнобойные орудия, вражеский корабль перемещался на некоторое расстояние после того, как были выпущены снаряды. По прибытии снарядов возникла необходимость выяснить, где будет находиться вражеский корабль, цель. Процесс отслеживания того, где вероятнее всего будет находиться корабль, назывался дальномером, потому что расстояние до цели - дальность - было очень важным фактором для точного наведения орудий. Со временем поезд (также называемый пеленгом), направление к цели, также стал частью дальности, но традиция сохранила этот термин.
Диапазон является прекрасным примером применения аналоговых вычислений к реальной проблеме математического моделирования. Потому что нации вложили так много денег в свои крупные корабли, они были готовы вложить огромные деньги в развитие диапазон оборудования, чтобы гарантировать, что орудия этих кораблей могут наводить свои снаряды на цель. В данной статье представлен обзор выгула как задачи математического моделирования. Чтобы сделать это обсуждение более конкретным, в центре внимания данного обсуждения будет Ford Mk 1 Rangekeeper. Ford Mk 1 Rangekeeper впервые был установлен на USSТехас в 1916 г. во время Первая Мировая Война. Это относительно хорошо задокументированный дальнобойщик с долгим сроком службы.[1] Будучи ранней формой механического дальнобойщика, он иллюстрирует все основные принципы.[2] Охотники за стрельбой из других стран использовали аналогичные алгоритмы для вычисления углов орудия, но часто сильно отличались в их оперативном использовании.[3]
Помимо стрельбы на дальние дистанции, запуск торпеды также требует функции дальномера.[4] ВМС США во время Вторая Мировая Война имел ВМТ, которая была единственной системой управления торпедным огнем подводных лодок времен Второй мировой войны, которая включала в себя механический дальномер (другие военно-морские силы полагались на ручные методы). Существовали также дальномеры для использования с надводными корабельными торпедами. Для представления дальности за пределами ВМС США есть подробный справочник, в котором обсуждается математика дальности, связанная с управлением торпедным огнем в Императорский флот Японии.[5]
Следующее обсуждение построено по образцу презентаций в руководствах по стрельбе ВМС США времен Второй мировой войны.[6]
Анализ
Система координат
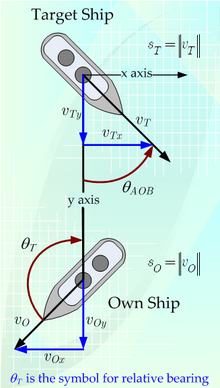
ВМС США дальнобойщики в течение Вторая Мировая Война использовала движущуюся систему координат, основанную на прямой видимости (LOS) между кораблем, стреляющим из пушки (известной как «собственный корабль»), и целью (известной как «цель»). Как показано на рисунке 1, дальномер определяет «ось y» как LOS, а «ось x» как перпендикуляр к LOS с началом координат двух осей, центрированных на цели.
Важным аспектом выбора системы координат является понимание знаков различных скоростей. Скорость смены пеленга положительная по часовой стрелке. Скорость дальности положительна для увеличения целевой дальности.
Отслеживание цели
Основной подход
Во время Второй мировой войны отслеживание цели означало постоянное знание дальности и пеленга цели. Эти параметры цели периодически измерялись моряками, укомплектовывающими орудия.[7] и радарные системы, которые затем передавали данные в дальномер. Смотритель выполнил линейная экстраполяция дальности и пеленга цели как функции времени на основе выборок информации о цели.
В дополнение к наблюдению за целями с борта, дальнобойщики также могли получать информацию от самолетов или даже самолетов. пилотируемые воздушные шары привязан к собственному кораблю. Эти платформы для обнаружения могли быть запущены и восстановлены с больших боевых кораблей, например линкоров. Как правило, наблюдения за целями, проводимые с помощью судовых приборов, предпочтительнее для целей на дальностях менее 20 000 ярдов, а наблюдения с самолетов - для целей с большей дальностью.[8] После Второй мировой войны стали доступны вертолеты, и отпала необходимость в проведении опасных операций по запуску и восстановлению самолетов или воздушных шаров-зондировщиков (см. Айова-классный линкор для краткого обсуждения).
Во время Первой мировой войны информация слежения за целями часто представлялась на листе бумаги.[9] Во время Второй мировой войны информация слежения могла отображаться на электронных дисплеях (см. Эссексавианосец для обсуждения общих дисплеев).
Диапазон до цели
В начале Второй мировой войны дальность до цели измерялась оптические дальномеры. Хотя некоторые ночные операции проводились с использованием прожекторы и звездные снаряды, в основном оптические дальномеры ограничивались дневной работой.[10] Во второй половине Второй мировой войны радар использовался для определения дальности до цели. Радар оказался точнее[11] чем оптические дальномеры (по крайней мере, в условиях эксплуатации)[12] и был предпочтительным способом определения дальности до цели как днем, так и ночью.[13]
Скорость цели
В начале Второй мировой войны дальность до цели и измерения пеленга проводились в течение определенного периода времени и вручную наносились на карту.[14]Скорость и курс цели могут быть вычислены с использованием расстояния, которое цель прошла за интервал времени. Во время последней части Второй мировой войны скорость цели можно было измерить с помощью данных радара. Радар обеспечивал точную скорость пеленга, дальность и радиальную скорость, которые преобразовывались в курс и скорость цели.
В некоторых случаях, например, с подводными лодками, скорость цели можно оценить с помощью данных сонара. Например, оператор гидролокатора может акустически измерить скорость поворота винта и, зная класс корабля, вычислить скорость корабля (см. ВМТ для дополнительной информации).
Курс цели
Целевой курс был самым трудным для получения данных о цели. Во многих случаях вместо измерения курса на цель многие системы измеряли связанную величину, называемую угол на носу. Угол на носу - это угол между курсом корабля и линией прямой видимости (см. Рисунок 1).
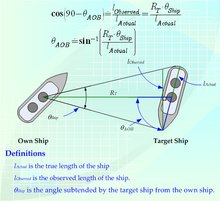
Угол наклона лука обычно оценивался на основе наблюдательного опыта наблюдателя. В некоторых случаях наблюдатели улучшили свои оценочные способности, тренируясь на моделях кораблей, установленных на "ленивая Сьюзан ".[15] В Императорский флот Японии имел уникальный инструмент под названием Сокутекибан (測 的 盤),[16] который использовался для помощи наблюдателям при измерении угла на носу. Сначала наблюдатель будет использовать это устройство для измерения угловой ширины цели. Зная угловую ширину цели, расстояние до цели и известную длину этой цели. класс корабля, угол на носу цели можно рассчитать с помощью уравнений, показанных на рисунке 2.
Для определения угла наклона лука требовались наблюдатели. Чтобы сбить с толку наблюдателей, корабли часто использовали ослепительный камуфляж, который состоял из рисование линий на корабле чтобы затруднить определение угла цели на луке. В то время как ослепляющий камуфляж был полезен против некоторых типов оптических дальномеров, этот подход был бесполезен против радара, и он потерял популярность во время Второй мировой войны.
Прогноз позиции
Предсказание позиции корабля-цели во время удара снаряда имеет решающее значение, потому что это позиция, на которую должны быть направлены орудия собственного корабля. Во время Второй мировой войны большинство дальнобойщиков выполняли прогнозирование местоположения, используя линейную экстраполяцию курса и скорости цели. Хотя корабли маневренны, большие корабли маневрируют медленно, и во многих случаях линейная экстраполяция является разумным подходом.[17]
Во время Первой мировой войны дальнобойщиков часто называли «часами» (например, см. часы дальности и пеленга в Таблице управления огнем Дрейера ). Эти устройства были названы часами, потому что они регулярно увеличивали целевой диапазон и оценки угла, используя фиксированные значения. Этот подход имел ограниченное применение, потому что изменения пеленга цели являются функцией дальности, а использование фиксированного изменения приводит к тому, что прогноз пеленга цели быстро становится неточным.[18]
Прогнозируемый диапазон
Дальность до цели во время удара снаряда можно оценить с помощью уравнения 1, которое показано на рисунке 3.
| (Уравнение 1) |
|---|

куда
- - расстояние до цели в момент попадания снаряда.
- - дальность до цели во время выстрела.
- время полета снаряда плюс система
задержки стрельбы[19] , т.е. .






Точное прогнозирование дальности до цели во время удара снаряда затруднено, поскольку для этого необходимо знать время полета снаряда, которое является функцией намеченного положения цели. Хотя этот расчет может быть выполнен методом проб и ошибок, это не было практическим подходом с аналоговый компьютер оборудование, доступное во время Второй мировой войны. В случае Ford Rangekeeper Mk 1 время полета было приблизительно определено исходя из предположения, что время полета было линейно пропорционально дальности, как показано в уравнении 2.[20]
| (Уравнение 2) |
|---|

куда
- - постоянная пропорциональности между временем полета (TOF) и дальностью полета до цели.

Предположение о том, что TOF линейно пропорционален диапазону, является грубым и может быть улучшено за счет использования более сложных средств оценки функции.
Для прогнозирования дальности необходимо знать скорость изменения дальности. Как показано на рисунке 3, скорость изменения диапазона может быть выражена, как показано в уравнении 3.
| (Уравнение 3) |
|---|

куда
- - скорость собственного судна вдоль LOS, где .
- - скорость корабля-цели вдоль LOS, где .




Уравнение 4 показывает полное уравнение для прогнозируемого диапазона.
| (Уравнение 4) |
|---|

Прогнозируемый азимут (поезд)

Предсказание азимута[21] выполняется аналогично прогнозированию дальности.[1] Уравнение 5 является фундаментальной зависимостью, вывод которой показан на рисунке 4.
| (Уравнение 5) |
|---|

куда
- - азимут до цели в момент выстрела.
- - азимут на цель в момент попадания снаряда.


Скорость смены пеленга можно вычислить с помощью уравнения 6, которое показано на рисунке 4.
| (Уравнение 6) |
|---|

куда
- - скорость собственного судна по оси x, т.е. .
- - целевая скорость по оси x, т.е. .




Подстановка , Уравнение 7 показывает окончательную формулу для прогнозируемого азимута.

| (Уравнение 7) |
|---|

Баллистическая коррекция

Стрельба из артиллерии по целям за пределами видимого диапазона исторически требовала расчетов на основе столы для обжига.[22]Точка попадания снаряда зависит от многих переменных:[23]
- Температура воздуха
- Плотность воздуха
- Ветер
- Классифицировать
- Вращение Земли
- Снаряд, взрыватель, характеристики оружия
- Начальная скорость
- Температура пороха
- Дрейф
- Параллакс между пушками и дальномерами и радиолокационными системами
- Разница высот между целью и артиллерийским орудием
Таблицы стрельбы содержат данные о стрельбе из артиллерийского орудия в стандартных условиях и поправки, необходимые для определения точки попадания в реальных условиях.[24] Было несколько способов реализовать огневой стол с использованием кулачков. Рассмотрим, например, рисунок 5. В этом случае угол пушки как функция дальности до цели и относительного возвышения цели представлен толщиной кулачка на заданном осевом расстоянии и угле. Офицер наведения орудия вводил дальность до цели и относительную высоту с помощью шкал. Тогда высота штифта представляет собой требуемый угол наклона пистолета. Эта высота штифта может использоваться для привода кулачков или шестерен, которые будут вносить другие поправки, например, для температуры топлива и типа снаряда.
Кулачки, используемые в дальномере, требовали очень точной обработки, чтобы точно наводить ружья. Поскольку эти кулачки были обработаны в соответствии со спецификациями, состоящими из таблиц данных, они стали одним из первых приложений ЧПУ Станки.[25]
В дополнение к корректировке цели и баллистической коррекции дальномер должен также корректировать волнообразное движение корабля. Военные корабли имели гироскоп с вертикальной осью вращения. Этот гироскоп определил два угла, определяющих наклон палубы корабля по отношению к вертикали. Эти два угла были переданы в дальномер, который применил поправку на основе этих углов.[26]
Хотя конструкторы дальнобойщиков потратили огромное количество времени на минимизацию источников ошибок в расчетах дальнобойщиков, были ошибки и неточности в информации, которые способствовали тому, что снаряды не попадали в цель с первого выстрела.[25] У дальнобойщика были циферблаты, которые позволяли вносить ручные корректировки в систему стрельбы дальнобойщика. Когда артиллерийские корректировщики вызывали корректировку, дальнобойщики вручную вводили корректировку, используя эти шкалы.[1]
Примечания
- ^ а б c Минделл, Дэвид (2002). Между человеком и машиной. Балтимор: Джонс Хопкинс. Приложение. ISBN 0-8018-8057-2.
- ^ Усовершенствования в технологии дальномера для стрельбы на дальние дистанции в основном коснулись автоматического управления пушкой и внедрения более совершенных датчиков, таких как радар. Основные уравнения управление огнем остались прежними.
- ^ Брэдли Фишер (9 сентября 2003 г.). «Обзор конструкции баллистических вычислителей военных кораблей USN и IJN». NavWeaps. Получено 2006-08-26.
- ^ Функции дальности торпеды и дальнобойной пушки различаются по масштабу. Например, время полета торпеды намного больше, чем у снаряда главного орудия линкора. Преимущества снаряда в скорости и скорострельности делают возможными дальнобойные выстрелы. Время полета торпеды настолько велико, что дальнобойные выстрелы невозможны. Немного документы действительно решайте эти проблемы.
- ^ Джексон, USNR, лейтенант (jg) J.G. (Февраль 1946 г.). Управление огнем японских торпед (PDF). Военно-морская техническая миссия США в Японии. Волокно О-1, Мишень О-32. Архивировано из оригинал (PDF) на 2007-07-20.
- ^ «Глава 19: Проблема борьбы с надводным огнем». Военно-морская артиллерия и артиллерия. Аннаполис, Массачусетс: Военно-морская академия США. 1958 [1950]. NavPers 10798-A. Получено 2006-08-26.
- ^ "Глава 20: Оружейники". Военно-морская артиллерия и артиллерия. Аннаполис, Массачусетс: Военно-морская академия США. 1958 [1950]. NavPers 10798-A. Получено 2006-10-15.
- ^ Юренс, Уильям (2004-12-24). "Эволюция артиллерийского дела линкоров в ВМС США, 1920-1945 гг.". Navweaps.com. Архивировано из оригинал на 2006-11-20. Получено 2006-10-18.
Обычно ожидалось, что воздушное пятно будет иметь незначительный эффект на дальностях менее 20 000 ярдов, где визуальное обнаружение оставалось главным. После этого преимущество воздушного пятна заметно возросло. В 1935 году военно-морское училище подсчитало, что воздушное пятно на высоте 29000 ярдов должно было нанести в шесть раз больше попаданий, чем наблюдение с высоты птичьего полета.
- ^ Построение проводилось вручную или с помощью механический плоттер в случае Стол Дрейера.
- ^ Например, статья Битва за остров Саво есть фотография, на которой изображен корабль, освещенный прожектором.
- ^ Лиенау, Питер; Тони ДиДжулиан (16.07.2001). "Немецкие оптические дальномеры". Navweps.com. Получено 2006-10-20.
Возьмем другой пример, линкоры США Северная Каролина, южная Дакота и Айова Классы имели дальномеры главного директора 25-кратной мощности с базовой длиной 26 футов 6 дюймов (8,0772 м) ... Например, чтобы найти ошибку в 20 000 м, просто умножьте 0,97 м на 20 000/2 000 = 9,7 м.
- ^ Имеющиеся данные показывают, что уровни точности оптических дальномеров и радаров были сопоставимы в идеальных оптических условиях. Однако характеристики оптического дальномера быстро ухудшались в погодных условиях, в то время как радар не пострадал. Надежность радара была решающим фактором в его популярности среди военно-морских сил.
- ^ "Глава 19C1". Морская артиллерия и артиллерийское дело: Том 2 Управление огнем. Бюро военно-морского персонала. 1958 [1950]. НавПерс 10798-А.
- ^ О'Кейн, Ричард Х. (1989) [1987]. «Часть 4: Глава 1». Wahoo: Патрули самой известной подводной лодки Америки времен Второй мировой войны (Bantam ed.). Нью-Йорк: Бантам. С. 108–109. ISBN 0-553-28161-5.
Возможность и разделение ответственности были новыми для наших подводных сил. Я ответил просто: «Я ценю ваше доверие, капитан», и сказал ему, что уезжаю. Сперри [а подводный тендер ], чтобы сделать ленивую Сьюзен для наших моделей кораблей. Мне бы они понадобились, чтобы отточить умение называть углы на луке быстро и точно ... Через один ствол пары перевернутых биноклей 7х35 я называл углы из кладовой на реалистичную цель.
- ^ Брэдли Фишер (9 сентября 2003 г.). «Обзор конструкции баллистических вычислителей военных кораблей USN и IJN». NavWeaps. Получено 2006-08-26.
Если длина цели известна, а также текущая дальность, оператор измеряет видимую длину судна в форме измерения пеленга (используя корму в качестве ориентира). Формула: угол инклинометра = L × Cos Ø / R, где: L - длина корабля, Ø - угол цели, а R - текущий диапазон.
- ^ В какой-то степени точность этого приближения зависит от времени полета снаряда. На максимальной дальности 16-дюймовые орудия одного Айова-учебный класс линкор имел время полета ~ 95 секунд. Однако корабли, вступающие в бой на таком расстоянии, были бы очень необычными. Фактически, самый длинный успешный между двумя военными кораблями произошло на расстоянии ~ 26 500 ярдов. Снаряд в этом случае имел бы время полета ~ 40 секунд (исходя из 16-дюймовых орудий калибра Айова учебный класс).
- ^ "Таблица управления огнем Дрейера". http://www.dreadnoughtproject.org/. Проект Дредноут. Получено 2006-10-30.
Часы пеленга в основном использовались в Dumaresq, и это могло позволить установить постоянную скорость подшипника ... Выходной сигнал постоянной скорости часов диапазона поступал в дифференциальное устройство, называемое корректором обнаружения, чья передача мультиплексировала его в трех других направлениях.
Внешняя ссылка в| работа =(помощь) - ^ Эта задержка представляет собой интервал времени между заданным временем стрельбы и фактическим временем стрельбы. Этот временной интервал включает любые задержки из-за времени передачи данных в башню и механических действий, необходимых для стрельбы из оружия.
- ^ Минделл, Дэвид (2002). Между человеком и машиной. Балтимор: Джонс Хопкинс. п. 325. ISBN 0-8018-8057-2.
Дальномер Ford считает время полета линейно пропорциональным дальности, что является лишь приблизительным значением.
- ^ Армия США использует азимут, а ВМС США - поезд. Эти два слова обозначают одно и то же понятие - горизонтальный целевой угол.
- ^ А.А. Таблица диапазонов для 16-дюймовых орудий 50 калибра. Бюро боеприпасов. 1944-03-11. Брошюра о боеприпасах № 1091. Получено 2006-10-29.
- ^ "Полевое руководство армии США 6-40, глава 7". Армия США. 2003-09-09. Получено 2006-10-13.
- ^ "Глава 17". Том 2 Управление огнем (Изд. 1958 г.). Аннаполис, Массачусетс: Военно-морская академия США. 1958 [1950]. NavPers 10798-A. Получено 2006-08-26.
- ^ а б А. Бен Клаймер (1993). "Механические аналоговые компьютеры Ганнибала Форда и Уильяма Ньюэлла" (pdf). 15 (2). IEEE Annals of the History of Computing. Получено 2006-08-26. Цитировать журнал требует
| журнал =(помощь) - ^ "Глава 19". Проблема управления наземным огнем (Изд. 1958 г.). Аннаполис, Массачусетс: Военно-морская академия США. 1958 [1950]. NavPers 10798-A. Получено 2006-08-26.
{kind=link}
внешняя ссылка
- Отчет USN о технологии IJN Torpedo: Этот отчет показывает, что Императорский флот Японии использовал тот же подход, что и ВМС США для выполнения функции дальномера.
- Британский контроль огня: Британское руководство по артиллерийскому оружию, в котором обсуждается их подход к дальнобойному оружию.
- Таблицы обжига: Презентация PowerPoint по таблицам обжига