Устройство механического преимущества - Mechanical advantage device - Wikipedia
А простая машина что показывает механическое преимущество называется механическое устройство преимущества - например:
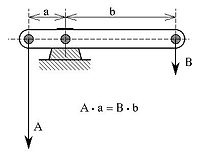
- Рычаг: The луч показано, находится в статическом равновесии вокруг точка опоры. Это связано с момент созданный векторной силой "А" против часовой стрелки (момент А* а) находясь в равновесии с моментом, создаваемым векторной силой "B" по часовой стрелке (момент B* б). Относительно низкая векторная сила "B" переводится в относительно высокую векторную силу "А". Таким образом, сила увеличивается в соотношении сил А: Б, что равно отношению расстояний до точки опоры б: а. Это соотношение называется механическим преимуществом. Эта идеализированная ситуация не учитывает трение.
- Колесо и ось движение (например, отвертки, дверные ручки ): Колесо - это, по сути, рычаг, одно плечо которого находится на расстоянии между осью и внешней точкой колеса, а другое - радиусом оси. Обычно это довольно большая разница, приводящая к пропорционально большому механическому преимуществу. Это позволяет даже простым колесам с деревянными осями, вращающимися в деревянных блоках, по-прежнему свободно вращаться, потому что их трение подавляется вращающей силой колеса, умноженной на механическое преимущество.
- А блокировать и ловить из нескольких шкивы создает механическое преимущество за счет наложения гибкого материала на несколько шкивов по очереди. Добавление большего количества петель и шкивов увеличивает механическое преимущество.
- Винт: Винт по сути наклонная плоскость обернутый вокруг цилиндра. Перемещение по этой наклонной плоскости - механическое преимущество винта.[1]
Шкивы
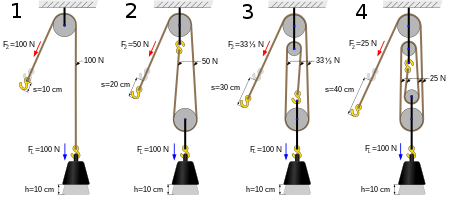
Рассмотрите возможность подъема груза с помощью веревки и шкивов. Веревка, пропущенная через шкив, прикрепленный к фиксированной точке, например стропила крыши сарая, прикрепленная к весу, называется одиночный шкив. Он имеет механическое преимущество (MA) = 1 (при условии, что подшипники качения в шкиве) не перемещает механического преимущества (или недостатка), каким бы выгодным ни было изменение направления.
А одиночный подвижный шкив имеет МА 2 (при условии, что в шкиве установлены подшипники качения). Рассмотрим шкив, прикрепленный к поднимаемому весу. Вокруг проходит веревка, один конец которой прикреплен к фиксированной точке наверху, например стропила крыши сарая, и к другому концу прилагается тянущее усилие, при этом две длины параллельны. В этой ситуации расстояние, которое атлет должен тянуть за веревку, становится в два раза больше расстояния, которое проходит вес, что позволяет уменьшить прикладываемое усилие вдвое. Примечание: если дополнительный шкив используется для изменения направления троса, например, человек, выполняющий работу, хочет стоять на земле, а не на балке, механическое преимущество не увеличивается.
Обматывая больше веревок вокруг большего количества шкивов, мы можем построить блок и захват, чтобы продолжать увеличивать механическое преимущество. Например, если у нас есть два шкива, прикрепленных к стропилам, два шкива, прикрепленные к весу, один конец, прикрепленный к стропилам, и кто-то, стоящий на стропиле, тянет веревку, мы имеем механическое преимущество в четыре. Снова обратите внимание: если мы добавим еще один шкив, чтобы кто-то мог стоять на земле и тянуть вниз, у нас все равно будет механическое преимущество в четыре.
Вот примеры, когда фиксированная точка не очевидна:
- Ремешок на липучке на обуви проходит через прорезь и складывается сам. Паз - подвижный шкив и МА = 2.
- Две веревки легли на пандус, прикрепленный к приподнятой платформе. Бочку наматывают на веревки, веревки пропускают через бочку и передают двум рабочим наверху аппарели. Рабочие стягивают веревки, чтобы бочка поднялась наверх. Ствол представляет собой подвижный шкив и MA = 2. Если существует достаточное трение в месте зажатия веревки между стволом и рампой, точка защемления становится точкой крепления. Это считается фиксированной точкой крепления, поскольку трос над стволом не перемещается относительно рампы. В качестве альтернативы концы веревки можно прикрепить к платформе.
Винты
Теоретическое механическое преимущество винта можно рассчитать с помощью следующего уравнения:[2]

куда
- dм = средний диаметр винтовой резьбы
- л = the вести винтовой резьбы
Обратите внимание, что реальное механическое преимущество винта система больше, поскольку отвертка или другая система завинчивания винта также имеет механическое преимущество.
- Наклонная плоскость: MA = длина откоса ÷ высота откоса
Смотрите также
Рекомендации
Примечания
Библиография
- Фишер, Лен (2003), Как макать пончик: наука повседневной жизни, Издательство Аркады, ISBN 978-1-55970-680-3.
- Бюро военно-морского персонала США (1971), Основные машины и как они работают (Пересмотренное издание 1994 г.), Courier Dover Publications, ISBN 978-0-486-21709-3.