Незначительная обратная связь петли - Minor loop feedback
Незначительная обратная связь петли это классический метод, используемый для разработки стабильных надежных линейных Обратная связь системы управления, использующие контуры обратной связи вокруг подсистем в рамках общего контура обратной связи.[1] Метод иногда называют синтез минорной петли в учебниках вузов,[1][2] некоторые правительственные документы.[3]
Метод подходит для проектирования графическими методами и использовался до появления цифровых компьютеров. Во время Второй мировой войны этот метод использовался для проектирования Закладка пистолета Системы управления.[4] Он все еще используется сейчас, но не всегда именуется. Это часто обсуждается в контексте Сюжет Боде методы. Незначительная обратная связь по петле может использоваться для стабилизации операционных усилителей.[5]
Пример
Сервопривод положения телескопа
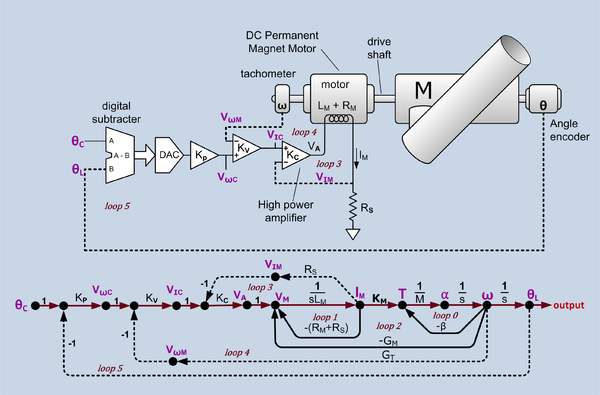
Этот пример немного упрощен (без передач между двигателем и нагрузкой) из системы управления для Телескоп Харлана Дж. Смита на Обсерватория Макдональда.[6] На рисунке показаны три контура обратной связи: контур управления током, контур управления скоростью и контур управления положением. Последний - основной цикл. Два других - второстепенные петли. Прямой путь, рассматривающий только прямой путь без обратной связи второстепенного контура, имеет три неизбежных этапа фазового сдвига. Индуктивность двигателя и сопротивление обмотки образуют фильтр нижних частот с полосой пропускания около 200 Гц. Ускорение до скорости - это интегратор а скорость к положению - интегратор. Это будет всего сдвиг фазы от 180 до 270 градусов. Простое подключение обратной связи по положению почти всегда приводит к нестабильному поведению.
Текущий контур управления
Самый внутренний контур регулирует ток в моментный двигатель. Этот тип двигателя создает крутящий момент, который почти пропорционален ротор ток, даже если он вынужден повернуть вспять. Из-за действия коммутатор, бывают случаи, когда одновременно возбуждаются две обмотки ротора. Если бы двигатель приводился в действие источником напряжения, управляемым напряжением, ток примерно удвоился бы, как и крутящий момент. Измеряя ток небольшим чувствительным резистором (RS) и подавая это напряжение обратно на инвертирующий вход усилителя возбуждения, усилитель становится источником тока, управляемым напряжением. При постоянном токе, когда две обмотки находятся под напряжением, они делят ток, и изменение крутящего момента составляет порядка 10%.
Контур управления скоростью
Следующий внутренний цикл регулирует скорость двигателя. Сигнал напряжения от Тахометр (небольшой генератор постоянного тока с постоянными магнитами) пропорционален угловой скорости двигателя. Этот сигнал возвращается на инвертирующий вход усилителя регулировки скорости (KV). Система управления скоростью делает систему «жестче», когда она представлена изменениями крутящего момента, такими как ветер, движение вокруг второй оси и пульсация крутящего момента от мотора.
Контур управления положением
Самая внешняя петля, основная петля, регулирует положение груза. В этом примере обратная связь по положению фактического груза представлена в виде Энкодер который производит двоичный выходной код. Фактическое положение сравнивается с желаемым с помощью цифрового вычитателя, который управляет ЦАП (Цифро-аналоговый преобразователь ), который приводит в действие усилитель управления положением (Kп). Управление положением позволяет сервоприводу компенсировать провисание и небольшую пульсацию положения, вызванную шестернями (не показаны) между двигателем и телескопом.
Синтез
Обычная процедура проектирования заключается в разработке самой внутренней подсистемы (текущий контур управления в примере телескопа) с использованием локальной обратной связи для линеаризации и выравнивания усиления. Стабильность обычно обеспечивается Сюжет Боде методы. Обычно пропускная способность делается максимально широким. Затем строится следующий цикл (контур скорости в примере телескопа). Пропускная способность этой подсистемы должна быть в 3-5 раз меньше, чем полоса пропускания закрытой системы. Этот процесс продолжается, и каждый цикл имеет меньшую полосу пропускания, чем полоса пропускания закрытой системы. До тех пор, пока полоса пропускания каждого контура меньше, чем полоса пропускания замкнутой подсистемы в 3-5 раз, фазовым сдвигом замкнутой системы можно пренебречь, т.е. подсистему можно рассматривать как простое плоское усиление. . Поскольку полоса пропускания каждой подсистемы меньше, чем полоса пропускания системы, которую она включает, желательно сделать полосу пропускания каждой подсистемы как можно большей, чтобы было достаточно полосы пропускания во внешнем контуре. Система часто выражается как График потока сигналов и его общая передаточная функция может быть вычислена из Формула усиления Мэйсона.
Рекомендации
- ^ а б Куо, Бенджамин С. (1991), Системы автоматического управления, Прентис-Холл, ISBN 978-0-13-051046-4
- ^ Браун, Гордон С .; Кэмпбелл, Дональд П. (1948), Принципы сервомеханизмов, Джон Уайли и сыновья
- ^ Лейнингер, Гэри, Применение метода проектирования MNA к нелинейному турбовентиляторному двигателю (PDF), получено 18 мар 2011
- ^ Беннетт, Стюарт, Краткая история автоматического управления (PDF), п. 20, заархивировано из оригинал (PDF) на 2011-10-07, получено 18 мар 2011
- ^ Лундберг, Внутренняя и внешняя компенсация операционного усилителя: учебное пособие, ориентированное на управление, получено 18 мар 2011
- ^ Диттмар, Дэвид (1–5 марта 1971 г.). Конференция по проектированию больших телескопов, Труды Европейской южной обсерватории / ЦЕРН (Conseil Europeen pour la Recherche Nucleaire) Конференция. Женева, Швейцария (опубликовано в июне 1971 г.). п. 383.
внешняя ссылка
- Ли, Юньфэн и Роберто Горовиц. "Мехатроника электростатических микроактюаторов для двухступенчатых сервосистем дисковода компьютеров." Транзакции IEEE / ASME по мехатронике, Vol. 6 № 2. Июнь 2001 г.
- Доусон, Джоэл Л. "Системы обратной связи. "MIT.
- Конференция по большим телескопам, 1971 г., содержит полный текст презентации Диттмара.