ССЭТИ Экспресс Спутник - SSETI Express Satellite
Эта статья нужны дополнительные цитаты для проверка. (Декабрь 2016 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
ССЭТИ Экспресс был первым космический корабль будет спроектирован и построен европейскими студентами и запущен Европейское космическое агентство.ССЭТИ Express (SSETI - аббревиатура от Student Space Exploration and Technology Initiative) - это небольшой космический корабль По размеру и форме похожа на стиральную машину. На борту космического корабля, построенного студентами, находились три CubeSat пикоспутники, чрезвычайно маленькие спутники весом около одного кг каждый.[1] Они были развернуты через час сорок минут после запуска. 23 университетские группы, работающие из разных мест Европа и с очень разным культурным прошлым, работали вместе через Интернет совместно создать спутниковое. Ожидаемый срок службы миссии планировалось составить 2 месяца. Экспресс - самый быстроразвиваемый микроспутник в истории.[нужна цитата ]
Пикоспутники
На борту космического корабля находились три пикоспутника:
- XI-V из Япония, Токийский университет
Его основная задача - демонстрация новых разработок. солнечные батареи в Космос. Другие цели миссии включают приобретение земной шар изображения с коммерческой стандартной цифровой камеры и операции сообщения коробка передач обслуживание с использованием любителя радио частота.
- UWE-1 из Германия, Вюрцбургский университет
Основная цель UWE-1 (экспериментального спутника 1 Вюрцбургского университета) - проведение телекоммуникационных экспериментов, связанных с оптимизацией связанной с Интернетом инфраструктуры для космических приложений.
- Ncube-2 из Норвегия, Ракетный полигон Андёя
Он содержит автоматизированную систему идентификации (АИС), используемую для получения GPS сигналы. Сигналы AIS от Ncube II обнаруживаются и передаются на наземные станции Ncube, что позволяет им отслеживать спутник.
Цель
Цель Express - фотографировать земной шар, выступать в качестве испытательного стенда и демонстратора технологий для оборудования ESEO, а также функционировать как радио транспондер для мирового радиолюбительского сообщества. Это пилотный проект для студенческого сообщества SSETI и демонстрация того, как эксперты ESA могут поддержать студенческие инициативы. Кроме того, он призван стать источником вдохновения для других образовательный спутниковые программы, но и логистический предшественник будущих проектов микроспутников SSETI.
Запуск
- Дата и время запуска: 27 октября 2005 г., 08:52 CEST
- Ракета-носитель: Космос-3М
- Зона запуска: Космодром Плесецк
- Первый сигнал: 27 октября 2005 г., 10:29 CEST
- Тип орбиты: низкоземельная солнечно-синхронная
- Высота: 686 км
- Наклонение: 98 град.
- Эксцентриситет: 0
Наземные станции
Наземные станции, управляющие спутником, когда он находится на орбите, следующие:
- Основная наземная станция (Ольборг, Дания )
Основная наземная станция миссии состоит из антенн слежения, сверхвысокой частоты (УВЧ ) радио, понижающий преобразователь S-диапазона в сверхвысокую частоту (VHF), УКВ радио, а Контроллер терминального узла (TNC) и управляющий компьютер. Это основная командная станция для управления космическим кораблем.
- Вторичная наземная станция (Свальбард, Норвегия )
Вторичная наземная станция обеспечивает избыточную поддержку УВЧ для восходящей линии связи телеуправления и нисходящей линии телеметрии миссии.
- Компьютер управления полетом (Ольборг, Дания)
Компьютер управления полетом (MCC) - это интерфейс между оперативной группой и двумя наземными станциями. Он способен управлять восходящей линией детальных планов полета к космическому кораблю и имеет базу данных, в которой хранится вся телеметрия нисходящей линии связи. MCC можно управлять дистанционно.
- Операционная группа (Варшава, Польша )
Операционная группа отвечает за определение планов полета и управление космическим кораблем через ЦУП и наземные станции.
- База данных телеметрического интерфейса (Франция )
База данных интерфейса телеметрии (TIDB) - это веб-приложение, облегчающее распространение всей телеметрии миссии от MCC до групп SSETI Express, радиолюбителей и широкой общественности.
Характеристики
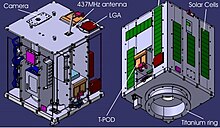
- Размер: прибл. 60x60x90см.
- UHF: 437,250 МГц, 9,6 кбит / с, AX 25
- S-диапазон: 2401,84 МГц, 38,4 кбит / с, AX25
- Потребляемая мощность: на корпусе солнечные панели
- Средняя выходная мощность: 12 Вт
- Пиковая выходная мощность: 20 Вт
- Батареи: Li Ion, 90 Втч
- Движение: Азот холодный газ
- Установка состоит из одного резервуара высокого давления с содержанием газообразного азота около 2 кг при давлении 300 бар в качестве топлива для всей миссии, в общей сложности шести клапанов, двух регуляторов давления для регулирования потока, 4 миниатюрных двигателей, трех датчиков давления, и 10 датчиков температуры.
- Камера: 100 м / пиксель, 1280 * 1024 пиксели
- Камера основана на датчике изображения Kodak CMOS, который обеспечивает разрешение 1280x1024 пикселей при глубине цвета 24 бита.
- Вес: 62 кг
- Полезная нагрузка: 24 кг
- Температурный контроль: пассивный
Подсистемы
- ACDS (Ольборг, Дания )
Система определения и контроля отношения состоит из двух частей. В Система контроля отношения использует полуактивную магнитную стабилизацию. Пара магниторез обеспечивают функцию отсоединения и активно гасят любые последующие вибрации, в то время как пассивный постоянный магнит обеспечивает совмещение оси z космического корабля с земной магнитное поле.
- CAM (Ольборг, Дания)
Бортовая камера (CAM) основана на цветном дополнительный металлооксидный полупроводник (CMOS) датчик и блок управления прибором.
- EPS (Неаполь, Италия )
Электроэнергетическая система (EPS) основана на концепции выработки электроэнергии за счет установки на кузове. фотоэлектрические элементы. Энергия хранится в перезаряжаемой литий-ионный аккумулятор для обеспечения доступности электроэнергии во время фаз затмения или в периоды низкой освещенности.
- Магия (Лозанна, Швейцария )
Блок управления двигателем ласково называют «волшебным» блоком. Эта подсистема обрабатывает команды, связанные с двигательной установкой, управляет подруливающее устройство клапанов и выполняет сбор данных с различных термисторов и датчиков давления.
- ММАС (Сарагоса, Испания )
Подсистема анализа миссии (MIAS) не производит никакого оборудования, а производит данные: она отвечает за дизайн космической миссии, а также за все связанные с ней вычисления, то есть траектории, затмения, окна связи и т. Д. Команда МИАС также предположила, что полетная динамика после запуска в основном сопоставила текущую траекторию спутника с ожидаемой, и предложила исправления на случай, если эти два значения будут слишком сильно отличаться.
- OBC (Ольборг, Дания)
Бортовой компьютер (OBC) управляет космическим кораблем во время работы с номинальной и полезной нагрузкой и собирает все телеметрия и данные о полезной нагрузке для последующей передачи на землю.
- ПРОП (Штутгарт, Германия )
Полезная нагрузка двигательной установки (PROP) представляет собой систему управления ориентацией на холодном газе с четырьмя двигателями низкого давления, питаемую от системы регулирования давления.
- S-диапазон ANT (Вроцлав, Польша )
В S-диапазон патч-антенны (S-Band ANT) адаптированы с микроспутника ESEO. Используется набор из трех направленных патч-антенн, общая мощность которых составляет 3 Вт. циркулярно поляризованный излучение на частоте 2401,84 МГц.
- S-диапазон TX (AMSAT, Великобритания )
Радиолюбители из Великобритании разработали передатчик S-диапазона (S-Band TX). Он выполняет двойную функцию, обеспечивая как высокоскоростной нисходящий канал передачи данных миссии со скоростью 38 400 бит / с, так и, в сочетании с системой UHF, одноканальный аудио транспондер.
- СТРУ (Порту, Португалия )
Основная несущая конструкция космического корабля (СТРУ) состоит из алюминия. соты панели настроены аналогично игре, известной как крестики-нолики или крестики-нолики. Вторичная конструкция состоит из наружных боковых панелей из алюминия толщиной 1 мм, служащих монтажными поверхностями для солнечных элементов, датчиков солнечного света и другого легкого оборудования.
- Т-стручки (Торонто, Онтарио, Канада)
Каждый из трех Токио Пикоспутниковые орбитальные развертывающие устройства (T-POD) использовались для хранения пассажира. CubeSat во время запуска и для их развертывания из SSETI Express после выхода на орбиту.
- УВЧ (Хохенбрунн, Германия )
Блок сверхвысокой частоты (UHF) содержит радио и контроллер терминального узла (TNC) и является основной системой связи космического корабля.
Партнеры SSETI Express
- Европейское космическое агентство (ЕКА)
- Ольборгский университет, Дания
- Неаполитанский университет "Федерико II", Италия
- AMSAT-UK, Великобритания
- Ракетный полигон Андёя, Норвегия
- Голландский космос, Нидерланды
- EADS Space
- Хольгер Эккардт, Германия
- IABG, Германия
- ISF, Германия
- KSAT, Норвегия
- Карта, Франция
- Королевский морской корпус Нидерландов, Нидерланды
- Saft, Франция
- Snecma, Группа SAFRAN
- Surrey Satellite Technologies Limited, Великобритания
- Токийский университет Лаборатория интеллектуальных космических систем
- УТИАС-СФЛ, Канада
- Вюрцбургский университет, Германия
- Williamson Electronique, Франция
Смотрите также
- Европейское космическое агентство
- JAXA
- НАСА
- Космический корабль
- Космодром
- Инициатива по исследованию космического пространства и технологий для студентов
Рекомендации
- ^ а б «Успешно запущен первый студенческий спутник, построенный через Интернет». ЕКА. 27 октября 2005 г.. Получено 31 января 2016.
- ^ Вискор, Тор. «ССЭТИ - прошлое, настоящее и будущее». Получено 31 января 2016.
внешняя ссылка
- Официальный веб-сайт
- https://web.archive.org/web/20070902082824/http://www.sseti.pwr.wroc.pl/index.php?d=3&t=3
- http://www.express.space.aau.dk/index.php?language=en&page=sat
- Сообщение для прессы о презентации Sseti Express (испанский) http://ciencias.unizar.es/pdfs/heraldo1.pdf[постоянная мертвая ссылка ]
- Веб-страница Apside на Sseti Express (испанский) http://sseti.unizar.es/web/express_castellano.html