Активная и пассивная трансформация - Active and passive transformation

В аналитическая геометрия, пространственные преобразования в 3-мерном евклидовом пространстве подразделяются на активный или трансформации алиби, и пассивный или преобразования псевдонимов. An активное преобразование[1] это трансформация который фактически изменяет физическое положение (алиби, в другом месте) точки, или жесткое тело, который можно определить при отсутствии система координат; тогда как пассивное преобразование[2] просто изменение системы координат, в которой описывается объект (псевдоним, другое имя) (изменение карты координат или изменение основы ). От трансформация, математики обычно относятся к активным преобразованиям, а физики и инженеры может означать и то, и другое. Оба типа преобразования могут быть представлены комбинацией перевод и линейное преобразование.

Другими словами, пассивный преобразование относится к описанию такой же объект в двух разных системах координат.[3]С другой стороны, активное преобразование представляет собой преобразование одного или нескольких объектов относительно одной и той же системы координат. Например, активные преобразования полезны для описания последовательных положений твердого тела. С другой стороны, пассивные преобразования могут быть полезны при анализе движения человека для наблюдения за движением большеберцовая кость относительно бедренная кость, то есть его движение относительно a (местный) система координат, которая движется вместе с бедренной костью, а не (Глобальный) система координат, которая крепится к полу.[3]
Содержание
пример
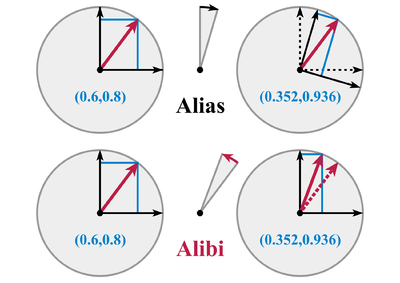
В качестве примера пусть вектор , - вектор на плоскости. Поворот вектора на угол θ против часовой стрелки задается матрица вращения:


который можно рассматривать либо как активное преобразование или пассивное преобразование (где указанная выше матрица будет инвертирована), как описано ниже.
Пространственные преобразования в евклидовом пространстве
В общем пространственная трансформация может состоять из перевода и линейного преобразования. В дальнейшем перевод будет опущен, а линейное преобразование будет представлено матрицей 3 × 3 .


Активная трансформация
Как активное преобразование, преобразует исходный вектор в новый вектор .


Если посмотреть в качестве новой основы, то координаты нового вектора в новой основе такие же, как у в исходной основе. Обратите внимание, что активные преобразования имеют смысл даже как линейное преобразование в другое векторное пространство. Имеет смысл записывать новый вектор в базисе без штриха (как указано выше), только когда преобразование происходит из пространства в себя.



Пассивное преобразование
С другой стороны, при просмотре как пассивное преобразование начальный вектор остается неизменной, а система координат и ее базисные векторы преобразуются в обратном направлении, то есть с обратным преобразованием .[4] Это дает новую систему координат XYZ с базисными векторами:


Новые координаты из относительно новой системы координат XYZ задаются формулами:


- .

Из этого уравнения видно, что новые координаты задаются
- .

Как пассивное преобразование преобразует старые координаты в новые.
Обратите внимание на эквивалентность между двумя видами преобразований: координаты новой точки в активном преобразовании и новые координаты точки в пассивном преобразовании одинаковы, а именно
- .

Смотрите также
использованная литература
- ^ Вайсштейн, Эрик В. «Преобразование Алиби». Материал из MathWorld - веб-ресурса Wolfram.
- ^ Вайсштейн, Эрик В. «Преобразование псевдонима». Материал из MathWorld - веб-ресурса Wolfram.
- ^ а б Джозеф К. Дэвидсон, Кеннет Хендерсон Хант (2004). «§4.4.1 Активная интерпретация и активное преобразование». Роботы и теория винта: приложения кинематики и статики к робототехнике. Издательство Оксфордского университета. п. 74 ff. ISBN 0-19-856245-4.
- ^ Амидрор, Исаак (2007). «Приложение D: Замечание D.12». Теория феномена муара: апериодические слои. Springer. п. 346. ISBN 978-1-4020-5457-0.
- Дирк Струик (1953) Лекции по аналитической и проективной геометрии, стр. 84, Эддисон-Уэсли.