Бистатический сонар - Bistatic sonar
Наиболее сонар системы являются моностатическими, поскольку передатчик и приемник находятся в одном месте. Бистатический сонар описывает, когда передатчик и приемник (-ы) разделены расстоянием, достаточно большим, чтобы быть сопоставимым с расстоянием до цели.
Бистатический против моностатического
Потери при распространении (передаче)
Это потеря уровня звука, которая происходит во время прохождения звукового импульса от проектора к цели и от цели к приемнику. Есть 3 разных механизма, вызывающих потеря передачи: сферическое (или цилиндрическое на мелководье) растекание, поглощение и рассеяние на неоднородностях среды океана. Потери при передаче (TL) пропорциональны дальности (чем дальше распространяется звук, тем больше потери) и частоте звука. В моностатическом сонаре звук сначала распространяется от проектора к цели, а затем таким же образом обратно от цели к приемнику, поэтому двусторонние потери составляют всего 2TL, где TL - односторонние потери. В бистатическом сонаре общие потери (в децибелах) равны сумма TLpt (от проектора к цели) и TLtr (от цели к приемнику).

Мертвая зона
В моностатическом сонаре первое, что слышит приемник, - это звук передаваемого сигнала. Этот уровень звука очень высок, и невозможно обнаружить эхо в течение периода времени τ. Это означает, что цели не обнаруживаются в пределах круга радиуса Cτ / 2, где C - скорость звука в воде. Эту зону обычно называют «мертвой зоной». Если гидролокатор находится близко к поверхности, дну или к обоим (что может случиться на мелководье), мертвая зона может быть больше Cτ / 2 из-за высокого уровня реверберации.
В бистатическом сонаре расстояние перемещения от проектора до цели и от цели до приемника составляет R = Rpt + Rtr . Поскольку проектор отделен от ресивера Rпр расстояние, первый Rпр / C секунд после начала пинга, получатель просто ждет. По истечении этого времени он получает прямой сигнал от проектора (часто называемый «прямой поток»,[1]), который длится τ секунд. Таким образом, гидролокатор не может обнаруживать цели внутри эллипса R = Rpr + Cτ, как показано на рисунке. Высокий уровень реверберации в области проектора не влияет на мертвую зону.
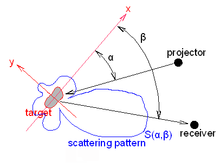
Диаграмма рассеяния цели
Цели не отражают звук во всех направлениях. Механизм отражения звука (или рассеяния на цели) сложен, потому что цель - не просто жесткий шар. Уровень рассеянного звука зависит от угла β, под которым цель освещается проектором, а также изменяется в зависимости от направления рассеяния угла α (см. Локальные оси цели Z {x, y}). Эти углы часто называют аспектами. Эта функция уровня рассеянного звука в зависимости от (α, β) называется диаграммой рассеяния S (α, β). Направление максимального эхо-сигнала (максимум S (α, β)) также зависит от формы и внутренней структуры цели. Так что иногда лучший обволакивающий аспект не совпадает с лучшим аспектом приема.
Это приводит к бистатическому решению. Рассеяние цели становится еще более сложным, если цель закопана (или частично захоронена) в донных отложениях моря. (Это случается с морскими минами, контейнерами для отходов, затонувшими кораблями и т. Д.) В этом случае на механизм рассеяния влияют не только характеристики цели, но также взаимодействие звуковой волны между целью и окружающим дном.
Особые классы бистатических сонаров
Обратное и прямое рассеяние
 Моностатический прием сонара |  Бистатическое обратное рассеяние |  Бистатическое рассеяние вперед |
В моностатический сонар приемник слушает эхо, которое отражается (рассеивается) прямо от цели. Статический сонар может работать двумя способами: используя либо обратное рассеяние цели, либо прямое рассеяние. Обратное рассеяние бистатический сонар - это сонар, в котором бистатический угол φ меньше 90 °.Прямое рассеяние физические явления основаны на Принцип Бабине. Бистатический гидролокатор с прямым рассеянием - это гидролокатор, в котором бистатический угол φ больше 90 °.
Псевдомоностатический сонар
Это гидролокатор с небольшим бистатическим углом. Другими словами, оба диапазона от проектора до цели Rpt и от цели к приемнику Rtr намного больше, чем расстояние от проектора до приемника Rпр.
Мультистатический сонар
Это многоузловая система с более чем одним проектором, приемником или обоими.
Приложения
 Наблюдение на большом расстоянии |  Сеть приемников с одним проектором |  Низкочастотный буксируемый гидролокатор |  Обнаружение захороненных предметов |
Наблюдение на большом расстоянии
Для прибрежного наблюдения большая приемная группа гидрофонов обычно развертывается близко к берегу и соединяется кабелями с наземным центром обработки данных. Для обнаружения цели на большом расстоянии (вдали от берега) можно использовать мощный мобильный проектор, развертываемый с корабля. В системе такого типа используется идея «приблизить проектор к области интереса и уменьшить потери передачи».
Наблюдение за большой площадью с помощью одного проектора и сети приемников
Система этого типа является мультистатической. В нем используется идея «покрыть интересующую область редкой сетью приемников и озвучить всю область с помощью мощного проектора». Приемные узлы могут быть гидроакустические буи (с радиосвязью с центром обработки) или автономными подводными аппаратами (АНПА) с акустической связью.[2] Примером является проект GOATS,[3] использование АНПА в качестве приемных узлов.
Низкочастотный буксируемый гидролокатор
Чем ниже частота, тем меньше компоненты поглощения и рассеяния потерь при передаче. С другой стороны, чем ниже частота, тем больше размер направленного проектора и приемной матрицы. Таким образом, развертываемый на корабле гидролокатор дальнего действия представляет собой низкочастотный гидролокатор с бистатической буксируемой антенной решеткой с пространственно разделенными проектором и приемной решеткой. Примером может служить буксируемый гидролокатор LFATS.[4]
Обнаружение закопанного объекта
Чтобы обнаружить закопанный объект, передаваемый сигнал должен проникать на дно. Для этого требуется мощный и направленный проектор. Затем направленный приемник следует разместить в точке, где отражение «цель + окружающее дно» является наилучшим. Это бистатическая система. Примером является проект SITAR,[5] разработан для поиска таких предметов, как контейнеры с токсичными отходами и мины.
Основные преимущества бистатического и мультистатического гидролокатора:[нужна цитата ]
- Снижение затрат на закупку и обслуживание (при использовании стороннего передатчика)
- Работа без частотного разрыва (при использовании передатчика стороннего производителя)
- Скрытая операция ресивера
- Повышенная устойчивость к электронным мерам противодействия, поскольку форма используемого сигнала и местоположение приемника потенциально неизвестны
- Возможное увеличенное радиолокационное сечение цели из-за геометрических эффектов
К основным недостаткам бистатического и мультистатического гидролокатора относятся:[нужна цитата ]
- Сложность системы
- Затраты на обеспечение связи между сайтами
- Отсутствие контроля над передатчиком (при использовании стороннего передатчика)
- Сложнее развернуть
- Уменьшение покрытия на низком уровне из-за необходимости прямой видимости из нескольких мест
Смотрите также
Рекомендации
- ^ Кокс Х. Основы бистатического активного сонара. В кн .: «Обработка подводных акустических данных» Я. Т. Чана (редактор). Спрингер, 1989 г.
- ^ Сяолун Ю. Проводная беспроводная связь с использованием высокоскоростных акустических модемов. MTS / IEEE Oceans 2000, Том 1. С. 417-422
- ^ Те-Чи Луи, Шмидт Х. Обнаружение и сопровождение целей на морском дне с помощью АНПА. MTS / IEEE Oceans 2002 г., Том 1. С. 474-478
- ^ П. К. Сенгупта. Конкурентные преимущества LFATS для подводных боевых действий на мелководье. FORCE, июнь 2005 г., стр. 8-10.
- ^ М. Коши, А. Каити, П. Блондель и Н. Жасундре. Возможный алгоритм классификации целей в геометриях бистатического сонара. В: "Граничные воздействия в высокочастотной акустике мелководья", Н.Г. Пейдж и П. Блондель (редакторы), Университет Бата, Великобритания, 2005 г.
Источники
дальнейшее чтение
- N. K. Naluai et al. Бистатические приложения обработки интенсивности. Журнал акустического общества Америки, 2007, 121 (4), стр. 1909–1915.
- Дж. Р. Эдвардс, Х. Шмидт и К. Лепейдж, "Обнаружение цели с бистатической синтетической апертурой и формирование изображений с помощью АНПА", IEEE Journal of Oceanic Engineering, 2001, 26 (4): стр. 690–699
- И. Люцифреди и Х. Шмидт. Докритическое рассеяние на заглубленных упругих оболочках. Журнал акустического общества Америки, 2006 г., 120 (6), стр. 3566–3583, 2006 г.
- Низкочастотный буксируемый гидролокатор Captas Nano. www.thalesgroup.com/naval
- J.I. Боуэн и Р.В. Митник. Методология прогнозирования мультистатической производительности. Технический дайджест Johns Hopkins APL, 1999, т.2, № 3, стр. 424–431
