Эхо - Echo sounding

Эхо это тип сонар используется для определения глубины воды путем передачи звуковых волн в воду. Регистрируется временной интервал между излучением и возвратом импульса, который используется для определения глубины воды вместе со скоростью звука в воде в данный момент. Эта информация затем обычно используется для целей навигации или для получения глубины для построения графиков. Эхолот может также относиться к гидроакустическим «эхолотам», определяемым как активный звук в воде (сонар), используемый для изучения рыб. При гидроакустических оценках для оценки биомассы и пространственного распределения рыбы традиционно использовались мобильные съемки с лодок. И наоборот, в методах фиксированного местоположения используются стационарные датчики для отслеживания проходящей рыбы.
Слово звучание используется для всех типов измерений глубины, в том числе тех, которые не используют звук, и не имеет отношения к слову звук в смысле шума или тонов. Эхо-зондирование - более быстрый метод измерения глубины, чем предыдущий метод понижения линия зондирования пока он не коснулся дна.
Техника

Расстояние измеряется путем умножения половины времени от исходящего импульса сигнала до его возврата на скорость звука в воды, что составляет приблизительно 1,5 километра в секунду [T ÷ 2 × (4700 футов в секунду или 1,5 килограмма в секунду)] Для точных приложений эхолокации, таких как гидрография скорость звука также необходимо измерять, как правило, с помощью зонд скорости звука в воду. Эхо-зондирование - это, по сути, специальное применение сонар используется для определения дна. Поскольку традиционный предварительныйSI единицей глубины воды была вникать, инструмент, используемый для определения глубины воды, иногда называют жиромер.Первый практичный жиромер был изобретен Герберт Гроув Дорси и запатентован в 1928 году.[1]
Самые популярные океан глубины используют среднюю или стандартную скорость звука. Если требуется более высокая точность, к регионам океана могут применяться средние и даже сезонные стандарты. Для глубин с высокой точностью, обычно ограничиваемых специальными или научными исследованиями, датчик может быть опущен для измерения температуры, давления и солености. Эти коэффициенты используются для расчета фактического скорость звука в местной толще воды. Этот последний метод регулярно используется Управлением береговой службы США для навигационных исследований прибрежных вод США. См. Руководство по полевым процедурам NOAA, веб-сайт Управления береговой службы (http://www.nauticalcharts.noaa.gov/hsd/fpm/fpm.htm ).
Общего пользования
Помимо помощи в навигации (на большинстве крупных судов будет хотя бы простой эхолот), эхолот обычно используется для рыбная ловля. Перепады высоты часто представляют собой места скопления рыб. Также будут зарегистрированы косяки рыб.[2] А эхолот это эхолот, используемый как любителями, так и коммерческими рыбаками.
Гидрография
В областях, где подробно батиметрия требуется, точный эхолот может быть использован для работы гидрографии. При оценке такой системы необходимо учитывать множество факторов, не ограничиваясь вертикальной точностью, разрешением, шириной акустического луча передающего / принимающего луча и акустической частота из преобразователь.

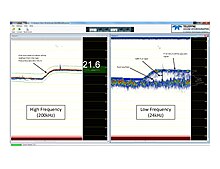
Большинство гидрографических эхолотов являются двухчастотными, что означает, что низкочастотный импульс (обычно около 24 кГц) может передаваться одновременно с высокочастотным импульсом (обычно около 200 кГц). Поскольку две частоты дискретны, два возвратных сигнала обычно не мешают друг другу. Есть много преимуществ двухчастотного эхолокации, в том числе возможность идентифицировать слой растительности или слой мягкой грязи поверх слоя горной породы.
В большинстве гидрографических работ используется датчик 200 кГц, который подходит для прибрежных работ на глубине до 100 метров. Более глубокая вода требует преобразователя более низкой частоты, поскольку акустический сигнал более низких частот менее чувствителен к затуханию в толще воды. Обычно используемые частоты для глубоководного зондирования - 33 кГц и 24 кГц.
Ширина луча преобразователя также важна для гидрографа, чтобы получить наилучшее разрешающая способность Для сбора данных предпочтительна узкая ширина луча. Это особенно важно при зондировании на большой глубине, так как результирующий след акустического импульса может быть очень большим, когда он достигает дна моря.
Помимо однолучевого эхолота, существуют эхолоты, способные принимать множество ответных сигналов. Эти системы подробно описаны в разделе, называемом многолучевой эхолот.
Эхолоты используются в лабораторных условиях для мониторинга процессов переноса наносов, размыва и эрозии в масштабных моделях (гидравлические модели, лотки и т. Д.). Их также можно использовать для создания 3D-контуров.
Стандарты гидрографического эхолота
Требуемая точность и точность гидрографического эхолота определяется требованиями Международная гидрографическая организация (IHO) для обследований, которые должны проводиться в соответствии со стандартами IHO.[3] Эти значения содержатся в публикации IHO S44.
Чтобы соответствовать этим стандартам, геодезист должен учитывать не только вертикальную и горизонтальную точность эхолота и преобразователя, но и геодезическую систему в целом. Можно использовать датчик движения, в частности компонент вертикальной качки (при однолучевом эхолотировании), чтобы уменьшить зондирование для движения судна на поверхности воды. Как только все погрешности каждого датчика будут установлены, гидрограф создаст бюджет неопределенности чтобы определить, соответствует ли система обследования требованиям, установленным IHO.
Различные гидрографические организации будут иметь свой собственный набор полевых процедур и руководств, которые помогут их геодезистам соответствовать требуемым стандартам. Два примера - публикация инженерного корпуса армии США EM110-2-1003,[4] и «Руководство по полевым процедурам» NOAA.[5]
История
Немецкий изобретатель Александр Бем получил немецкий патент № 282009 за изобретение эхолота. (устройство для измерения морских глубин, расстояний и курсов судов или препятствий с помощью отраженных звуковых волн) 22 июля 1913 г.[6][7][8]
Одним из первых коммерческих эхолотных аппаратов был Fessenden Fathometer, в котором использовался Осциллятор Фессендена для генерации звуковых волн. Впервые он был установлен Submarine Signal Company в 1924 году на лайнере M&M S.S. Berkshire.[9]
Смотрите также
- Акустическая океанография
- Александр Бем - изобретатель
- АНПА
- Батиметр
- Осциллятор Фессендена
- Акустика рыболовства
- Гидроакустика
- Гидрографические исследования
- Сонар
- Линия зондирования
- Зондирования
- Подводная акустика
использованная литература
- ^ «Методы эхо-зондирования / раннего звучания». Национальное управление океанических и атмосферных исследований (NOAA). Центральная библиотека NOAA. 2006 г.
В ответ на потребность в более точном устройстве регистрации глубины доктор Герберт Гроув Дорси, который позже присоединился к C&GS, разработал устройство визуальной индикации для измерения относительно коротких интервалов времени, с помощью которого можно было регистрировать мелководье и глубину. В 1925 году компания C&GS получила самый первый Fathometer, разработанный и построенный Submarine Signal Company.
- ^ "Гид по эхолотам" (на немецком). Получено 16 февраля 2017.
- ^ Международное гидрографическое бюро (февраль 2008 г.). «Стандарты МГО для гидрографических исследований» (PDF) (5-е издание). Архивировано из оригинал (PDF) 8 октября 2011 г. Цитировать журнал требует
| журнал =(Помогите) - ^ «Архивная копия». Архивировано из оригинал 20 июля 2011 г.. Получено 9 июн 2011.CS1 maint: заархивированная копия как заголовок (ссылка на сайт), Публикация USACE EM 1110-2-1003.
- ^ [1], Руководство NOAA по полевым процедурам.
- ^ Салус, Сана (2013). Измерение распространения радиоволн и моделирование каналов. Джон Уайли и сыновья. п. 424. ISBN 9781118502327.
- ^ Сюй, Гочан (2010). Науки геодезии - I: успехи и дальнейшие направления. Издательство Springer. п. 281. ISBN 9783642117411.
- ^ Вернер Шнайдер. "Александр Бем - Der Erfinder des Echolots". Получено 9 апреля 2014.
- ^ "Усилитель Fessenden Fathometer - Submarine Signal Company". Архивы Subchaser. Получено 12 апреля 2018.
внешние ссылки
![]() СМИ, связанные с Эхо в Wikimedia Commons
СМИ, связанные с Эхо в Wikimedia Commons
- "Как эхо говорят о глубине воды под кораблем" Ежемесячный журнал Popular Mechanics, Июль 1930 г. - прорисовка деталей ранних эхолотов с помощью эхо-сигналов
- ELAC (1982) Введение в эхолокацию. Honeywell-ELAC-Nautik GmbH, Киль, 88 стр., (pdf 27,5 МБ)


