Линейная разделимость - Linear separability
В Евклидова геометрия, линейная отделимость является свойством двух наборов точки. Это легче всего визуализировать в двух измерениях ( Евклидова плоскость ), думая, что один набор точек окрашен в синий цвет, а другой набор точек - в красный. Эти два набора линейно отделимый если существует хотя бы один линия на плоскости со всеми синими точками на одной стороне линии и всеми красными точками на другой стороне. Эта идея немедленно обобщается на многомерные евклидовы пространства, если прямую заменить на гиперплоскость.
Проблема определения, является ли пара наборов линейно разделимой, и нахождения разделяющей гиперплоскости, если они есть, возникает в нескольких областях. В статистика и машинное обучение, классификация определенных типов данных является проблемой, для которой существуют хорошие алгоритмы, основанные на этой концепции.
Математическое определение
Позволять и быть двумя наборами точек в п-мерное евклидово пространство. потом и находятся линейно отделимый если есть п + 1 действительные числа , так что каждая точка удовлетворяет и каждая точка удовлетворяет , куда это -й компонент .










Эквивалентно, два набора линейно разделимы именно тогда, когда их соответствующие выпуклые оболочки находятся непересекающийся (в просторечии не перекрывать друг друга).[нужна цитата ]
Примеры
Три не-коллинеарен точки в двух классах ('+' и '-') всегда линейно разделимы в двух измерениях. Это проиллюстрировано тремя примерами на следующем рисунке (случай "+" не показан, но аналогичен случаю "-"):
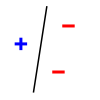 |  | 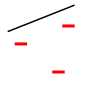 |
Однако не все наборы из четырех точек, ни три из них коллинеарны, линейно разделимы в двух измерениях. В следующем примере потребуется два прямые и, следовательно, не разделимы линейно:
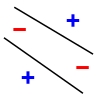 |
Обратите внимание, что три точки, которые коллинеарны и имеют форму «+ ⋅⋅⋅ - ⋅⋅⋅ +», также не являются линейно разделимыми.
Линейная отделимость булевых функций в п переменные
А Логическая функция в п переменные можно рассматривать как присвоение 0 или 1 к каждой вершине логического гиперкуб в п размеры. Это дает естественное разделение вершин на два множества. Булева функция называется линейно отделимый при условии, что эти два набора точек линейно разделимы. Количество различных булевых функций равно где п это количество переменных, переданных в функцию.[1]

| Количество переменных | Логические функции | Линейно разделимые булевы функции |
|---|---|---|
| 2 | 16 | 14 |
| 3 | 256 | 104 |
| 4 | 65536 | 1882 |
| 5 | 4294967296 | 94572 |
| 6 | 18446744073709552000 | 15028134 |
| 7 | 3.402823669 ×10^38 | 8378070864 |
| 8 | 1.157920892 ×10^77 | 17561539552946 |
| 9 | 1.340780792 ×10^154 | 144130531453121108 |
Опорные векторные машины

Классификация данных это обычная задача в машинное обучение Предположим, что даны некоторые точки данных, каждая из которых принадлежит одному из двух наборов, и мы хотим создать модель, которая будет определять, какой набор новый точка данных будет внутри. В случае опорные векторные машины, точка данных рассматривается как п-мерный вектор (список п числа), и мы хотим знать, можем ли мы разделить такие точки с помощью (п - 1) -мерный гиперплоскость. Это называется линейный классификатор. Есть много гиперплоскостей, которые могут классифицировать (разделять) данные. Один разумный выбор в качестве лучшей гиперплоскости - это та, которая представляет наибольшее разделение или запас между двумя наборами. Поэтому мы выбираем гиперплоскость так, чтобы расстояние от нее до ближайшей точки данных с каждой стороны было максимальным. Если такая гиперплоскость существует, она известна как гиперплоскость с максимальным запасом а линейный классификатор, который он определяет, известен как максимум классификатор маржи.
Более формально, учитывая некоторые данные обучения , набор п точки формы


где уя равно 1 или -1, что указывает на набор, к которому точка принадлежит. Каждый это п-размерный настоящий вектор. Мы хотим найти гиперплоскость с максимальным запасом, которая разделяет точки, имеющие от тех, у кого . Любую гиперплоскость можно записать как набор точек удовлетворение





где обозначает скалярное произведение и (не обязательно нормализованный) нормальный вектор в гиперплоскость. Параметр определяет смещение гиперплоскости от начала координат вдоль вектора нормали .



Если данные обучения линейно разделимы, мы можем выбрать две гиперплоскости таким образом, чтобы они разделяли данные, и между ними не было точек, а затем попытаться максимизировать их расстояние.
Смотрите также
Рекомендации
- ^ 1962-, Рассел, Стюарт Дж. (2016). Искусственный интеллект - современный подход. Норвиг, Питер 1956- (Третье изд.). Бостон. п. 766. ISBN 978-1292153964. OCLC 945899984.CS1 maint: числовые имена: список авторов (связь)
- ^ Gruzling, Nicolle (2006). «Линейная отделимость вершин n-мерного гиперкуба. Дипломная работа». Университет Северной Британской Колумбии. Цитировать журнал требует
| журнал =(Помогите)