Формула вращения Родригеса - Rodrigues rotation formula - Wikipedia
В теории трехмерное вращение, Формула вращения Родригеса, названный в честь Олинде Родригес, является эффективным алгоритмом поворота вектор в космосе, учитывая ось и угол поворота. В дальнейшем это может быть использовано для преобразования всех трех базисные векторы вычислить матрица вращения в ТАК (3), группа всех матриц вращения, из ось-угол представление. Другими словами, формула Родригеса предоставляет алгоритм для вычисления экспоненциальная карта из так(3), то Алгебра Ли из ТАК (3), к ТАК (3) без фактического вычисления полной матричной экспоненты.
Заявление
Если v вектор в ℝ3 и k это единичный вектор описывающая ось вращения, вокруг которой v поворачивается на угол θ согласно правило правой руки, формула Родригеса для повернутого вектора vгнить является

Альтернативным утверждением является запись вектора оси как перекрестное произведение а × б любых двух ненулевых векторов а и б которые определяют плоскость вращения, и смысл угла θ измеряется от а и к б. Сдача α обозначают угол между этими векторами, два угла θ и α не обязательно равны, но измеряются в одном и том же смысле. Тогда вектор единичной оси можно записать

Эта форма может быть более полезной, когда задействованы два вектора, определяющие плоскость. Примером в физике является Прецессия Томаса который включает вращение, заданное формулой Родригеса, с точки зрения двух неколлинеарных скоростей наддува, а ось вращения перпендикулярна их плоскости.
Вывод
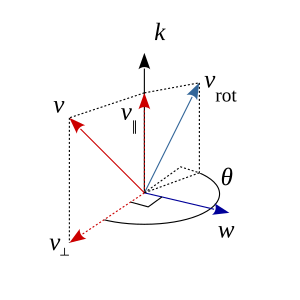

Позволять k быть единичный вектор определяя ось вращения, и пусть v быть любым вектором, чтобы вращаться вокруг k по углу θ (правило правой руки, против часовой стрелки на рисунке).
С использованием точка и перекрестные продукты, вектор v можно разложить на составляющие, параллельные и перпендикулярные оси k,

где компонент, параллельный k является

называется векторная проекция из v на k, а составляющая, перпендикулярная к k является

называется вектор отклонения из v из k.
Вектор k × v можно рассматривать как копию v⊥ повернут против часовой стрелки на 90 ° примерно k, поэтому их величины равны, но направления перпендикулярны. Аналогично вектор k × (k × v) копия v⊥ повернут против часовой стрелки через 180° о k, так что k × (k × v) и v⊥ равны по величине, но в противоположных направлениях (т. е. они противоположны друг другу, отсюда знак минус). Расширение вектор тройное произведение устанавливает связь между параллельными и перпендикулярными компонентами, для справки формула: а × (б × c) = (а · c)б − (а · б)c учитывая любые три вектора а, б, c.
Компонент, параллельный оси, не изменит ни величину, ни направление при вращении,

только перпендикулярный компонент изменит направление, но сохранит свою величину, согласно

и с тех пор k и v∥ параллельны, их перекрестное произведение равно нулю k × v∥ = 0, так что

и это следует

Этот поворот правильный, поскольку векторы v⊥ и k × v иметь одинаковую длину, и k × v является v⊥ повернут против часовой стрелки через 90° о k. Соответствующее масштабирование v⊥ и k × v с использованием тригонометрические функции синус и косинус дает повернутую перпендикулярную составляющую. Форма повернутого компонента аналогична радиальному вектору в двухмерной плоской полярные координаты (р, θ) в Декартова основа

куда еИкс, еу находятся единичные векторы в указанных направлениях.
Теперь полный повернутый вектор

Подставляя определения v∥rot и v⊥rot в уравнении приводит к

Матричные обозначения
Представляя v и k × v в качестве матрицы столбцов, перекрестное произведение может быть выражено как матричный продукт

Сдача K обозначают "матрица перекрестных продуктов "для единичного вектора k,
![{ displaystyle mathbf {K} = left [{ begin {array} {ccc} 0 & -k_ {z} & k_ {y} k_ {z} & 0 & -k_ {x} - k_ {y} & k_ {x} & 0 end {array}} right] ,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/734b982cadf1ec3e27f95a27ffa3f77723897261)
матричное уравнение, символически,

для любого вектора v. (Фактически, K - единственная матрица с этим свойством. Он имеет собственные значения 0 и ±я).
Итерация поперечного произведения справа эквивалентна умножению на матрицу поперечного произведения слева, в частности

Более того, поскольку k - единичный вектор, K есть единица 2-норма. Таким образом, предыдущая формула поворота на матричном языке выглядит так:

Обратите внимание, что коэффициент перед первым членом равен сейчас же 1 в этих обозначениях: см. Обсуждение группы Ли ниже.
Факторизация v позволяет компактное выражение

куда

это матрица вращения под углом θ против часовой стрелки вокруг оси k, и я то 3 × 3 единичная матрица. Эта матрица р является элементом группы вращения ТАК (3) из ℝ3, и K является элементом Алгебра Ли порождая эту группу Ли (обратите внимание, что K кососимметрична, что характеризует ).

В терминах матричной экспоненты

Чтобы убедиться, что последняя идентичность сохраняется, нужно отметить, что

характеристика однопараметрическая подгруппа, т.е. экспоненциальный, и что формулы совпадают для бесконечно малых θ.
Для альтернативного вывода, основанного на этой экспоненциальной зависимости, см. экспоненциальная карта из к ТАК (3). Об обратном отображении см. карта журнала из ТАК (3) к .
Обратите внимание, что Ходж Дуал вращения просто который позволяет извлечь как ось вращения, так и синус угла поворота из самого поворота с обычной неоднозначностью:




куда . Приведенное выше простое выражение является результатом того факта, что двойственный по Ходжу к и равны нулю, а .




Однако при применении формулы Родригеса обычную двусмысленность можно было устранить с помощью расширенной формы формулыа.
Смотрите также
Рекомендации
- Леонард Эйлер, "Problema algebraicum obffectiones prorsus singulares memorabile", Комментарий 407 Indicis Enestoemiani, Novi Comm. Акад. Sci. Petropolitanae 15 (1770), 75–106.
- Олинде Родригес, "Des lois géométriques qui régissent les déplacements d'un système solide dans l'espace, et de la вариации координат происхождения de ces déplacements, которые являются независимыми от причин qui peuvent les produire", Journal de Mathématiques Pures et Appliquées 5 (1840), 380–440.
- Дон Кокс, (2006) Исследования по математической физике, Springer Science + Business Media, LLC. ISBN 0-387-30943-8. Глава 4, стр. 147 и след. Круговой путь к геометрической алгебре »
- ^ а Лян, Куо Кан (2018). «Эффективное преобразование вращающейся матрицы в ось и угол вращения путем расширения формулы Родригеса». arXiv:1810.02999 [cs ].
внешняя ссылка
- Вайсштейн, Эрик В. "Формула вращения Родригеса". MathWorld.
- Йохан Э. Мебиус, Вывод формулы Эйлера-Родригеса для трехмерных вращений из общей формулы для четырехмерных вращений., arXiv Общая математика 2007.
- Другой наглядный пример см. http://chrishecker.com/Rigid_Body_Dynamics#Physics_Articles, Крис Хеккер, раздел физики, часть 4. «Третье измерение» - на странице 3, раздел «Ось и угол., http://chrishecker.com/images/b/bb/Gdmphys4.pdf