Synchro - Synchro
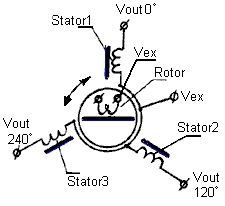

А синхронизация (также известен как сельсин и другими торговыми марками), по сути, трансформатор чья связь между первичной и вторичной обмотками может быть изменена путем физического изменения относительной ориентации двух обмоток. Синхросигналы часто используются для измерения угла вращающейся машины, такой как антенна Платформа. По своей общей физической конструкции он очень похож на электродвигатель. Первичная обмотка трансформатора, закрепленная на ротор, взволнован переменный ток, который электромагнитная индукция, вызывает появление напряжения между вторичными обмотками, соединенными Y, установленными под углом 120 градусов друг к другу на статор. Напряжения измеряются и используются для определения угла ротора относительно статора.

Использует
Системы Synchro впервые были использованы в системе управления Панамский канал в начале 1900-х лет для передачи блокировки ворота и шток клапана позиций и уровней воды, к столам управления.[1]

Система управления огнем конструкции, разработанные во время Вторая Мировая Война широко использовались синхронизаторы для передачи угловой информации от оружия и прицелов на аналоговый компьютер управления огнем, и для передачи желаемого положения пистолета обратно в местоположение пистолета. Ранние системы просто перемещали шкалы индикаторов, но с появлением амплидин Кроме мощных гидравлических сервоприводов с моторным приводом, система управления огнем могла напрямую контролировать положение тяжелых орудий.[2]
Меньшие по размеру синхронизаторы по-прежнему используются для дистанционного управления индикаторными приборами и в качестве датчиков положения поворота для поверхностей управления самолетом, где требуется надежность этих надежных устройств. Цифровые устройства, такие как поворотный энкодер заменили синхронизаторы в большинстве других приложений.
Двигатели Selsyn широко использовались в кинофильм оборудование для синхронизации кинокамеры и запись звука оборудование, до появления кварцевые генераторы и микроэлектроника.
Большие синхронизаторы использовались на морских военных кораблях, таких как эсминцы, для управления рулевым механизмом от штурвала на мостике.
Типы синхронных систем
Есть два типа синхронизирующих систем: системы крутящего момента и системы управления.
В системе крутящего момента синхронизатор обеспечивает маломощный механический выход, достаточный для позиционирования показывающего устройства, срабатывания чувствительного переключателя или перемещения легких грузов без усиления мощности. Проще говоря, система синхронизации крутящего момента - это система, в которой передаваемый сигнал выполняет полезную работу. В такой системе достижима точность порядка одного градуса.
В системе управления синхронизатор обеспечивает напряжение для преобразования в крутящий момент через усилитель и серводвигатель. Синхронизаторы управляющего типа используются в приложениях, требующих больших крутящих моментов или высокой точности, таких как следящие звенья и детекторы ошибок в сервоприводах, системах автоматического управления (таких как система автопилота). Проще говоря, система управления синхронизацией - это система, в которой передаваемый сигнал управляет источником энергии, который выполняет полезную работу.
Довольно часто одна система выполняет и крутящий момент, и функции управления. Отдельные блоки предназначены для использования либо в системах управления крутящим моментом, либо в системах управления. Некоторые блоки крутящего момента могут использоваться в качестве блоков управления, но блоки управления не могут заменить блоки крутящего момента.[3]
Функциональные категории Synchro
Синхронизация попадает в одну из восьми функциональных категорий. Вот они:[4]
- Датчик крутящего момента (TX)
- Вход: ротор позиционируется механически или вручную по передаваемой информации.
- Выход: электрический выходной сигнал статора, определяющий положение ротора, поступающий на приемник крутящего момента, датчик разности крутящего момента или приемник разности крутящего момента.
- Управляющий передатчик (CX)
- Вход: такой же, как TX.
- Выход: электрический выход такой же, как у TX, но подается на управляющий трансформатор или управляющий дифференциальный передатчик.
- Датчик дифференциала крутящего момента (TDX)
- Вход: выход TX применяется к статору; ротор расположен в соответствии с данными о количестве от TX, которые необходимо изменить.
- Выход: электрический выходной сигнал ротора (представляющий угол, равный алгебраической сумме или разнице угла положения ротора и угловым данным от TX), подаваемый на приемники крутящего момента, другой TDX или приемник дифференциала крутящего момента.
- Управляющий дифференциальный преобразователь (CDX)
- Ввод: то же, что и TDX, но данные предоставлены CX.
- Выход: такой же, как TDX, но подается только на управляющий трансформатор или другой CDX.
- Ресивер крутящего момента (TR)
- Ввод: данные электрического углового положения от TX или TDX, подаваемые на статор.
- Выход: Ротор принимает положение, определяемое подаваемым электрическим входом.
- Приемник дифференциала крутящего момента (TDR)
- Вход: электрические данные, поступающие от двух TX, двух TDX или от одного TX и одного TDX (один подключен к ротору, а другой - к статору).
- Выход: ротор принимает положение, равное алгебраической сумме или разности двух угловых входов.
- Трансформатор управления (CT)
- Вход: электрические данные от CX или CDX, приложенные к статору. Ротор позиционируется механически или вручную.
- Выход: электрический выходной сигнал ротора (пропорционален синусу разницы между угловым положением ротора и входным электрическим углом.
- Приемник-передатчик крутящего момента (TRX)
- Этот синхронизатор был разработан как приемник крутящего момента, но может использоваться как передатчик или как приемник.
- Ввод: в зависимости от приложения, как TX.
- Вывод: в зависимости от приложения, такой же, как TX или TR.
Операция
На практике синхронизаторы напоминают двигатели тем, что имеют ротор, статор и вал. Обычно контактные кольца и кисти подключите ротор к внешнему источнику питания. Вал синхронного передатчика вращается механизмом, который отправляет информацию, в то время как вал синхронного приемника вращает циферблат или воздействует на небольшую механическую нагрузку. Обычно используются одно- и трехфазные блоки, которые при правильном подключении будут следовать чередованию друг друга. Один передатчик может повернуть несколько приемников; если крутящий момент является фактором, передатчик должен быть физически больше, чтобы обеспечивать дополнительный ток. В системе блокировки кинофильмов большой распределитель с приводом от двигателя может управлять до 20 машинами, дублерами звука, счетчиками отснятого материала и проекторами.
Синхросигналы, разработанные для наземного использования, имеют тенденцию приводить в движение 50 или 60 герц (в сеть частота в большинстве стран), в то время как те, которые используются на море или в авиации, как правило, работают на частоте 400 Гц (частота бортового электрический генератор приводится в движение двигателями).
Однофазные блоки имеют пять проводов: два для обмотки возбудителя (обычно линейное напряжение) и три для выхода / входа. Эти три подключены к другим синхронизаторам в системе и обеспечивают питание и информацию для выравнивания валов всех приемников. Синхронные передатчики и приемники должны питаться, так сказать, от одной ответвленной цепи; источники напряжения возбуждения сети должны совпадать по напряжению и фазе. Самый безопасный подход - это соединить пять или шесть линий от передатчиков и приемников в общей точке. Сельсины разных производителей, используемые в системах блокировки, имеют разное выходное напряжение. Во всех случаях трехфазные системы будут обрабатывать большую мощность и работать немного более плавно. Возбуждение часто происходит от трехфазной сети 208/240 В. Многие синхронизаторы также работают от 30 до 60 В переменного тока.
Синхронные передатчики такие же, как описано, но для синхронных приемников 50 и 60 Гц требуются поворотные демпферы, чтобы их валы не колебались, когда они не нагружены (как в случае с дисками) или слегка нагружены в высокоточных приложениях.
Другой тип приемника, называемый управляющим трансформатором (CT), является частью сервопривода положения, который включает в себя сервоусилитель и серводвигатель. Двигатель соединен с ротором ТТ, и когда ротор передатчика движется, серводвигатель поворачивает ротор ТТ и механическую нагрузку в соответствии с новым положением. Трансформаторы тока имеют статоры с высоким импедансом и потребляют гораздо меньше тока, чем обычные синхронизирующие приемники, когда они неправильно расположены.
Синхронные передатчики также могут передавать синхронизирующие сигналы на цифровые преобразователи, которые обеспечивают цифровое представление угла вала.
Варианты Synchro
Использование так называемых бесщеточных синхронизаторов вращающиеся трансформаторы (которые не имеют магнитного взаимодействия с обычным ротором и статором) для подачи энергии на ротор. Эти трансформаторы имеют неподвижные первичные обмотки и вращающиеся вторичные обмотки. Вторичная обмотка чем-то похожа на катушку, намотанную магнитной проволокой, ось катушки концентрична с осью ротора. «Катушка» - это сердечник вторичной обмотки, ее фланцы - полюса, и ее сцепление не сильно зависит от положения ротора. Первичная обмотка аналогична, окружена магнитным сердечником, а ее концевые части похожи на толстые шайбы. Отверстия в этих наконечниках совпадают с вращающимися вторичными полюсами.
Для обеспечения высокой точности управления огнем орудий и аэрокосмических работ использовались так называемые многоскоростные синхронные каналы передачи данных. Например, двухскоростное звено имело два передатчика, один из которых вращался на один оборот во всем диапазоне (например, подшипник ружья), а другой - на один оборот на каждые 10 градусов подшипника. Последний назывался 36-ступенчатым синхронизатором. Конечно, и зубчатые передачи были сделаны соответственно. В приемнике величина ошибки канала 1X определяет, следует ли использовать вместо этого «быстрый» канал. Небольшая ошибка 1X означала, что данные канала 36x были однозначными. Как только сервопривод приемника установился, канал точной настройки обычно сохраняет управление.
Для очень ответственных приложений использовались трехскоростные синхронизирующие системы.
Так называемые многоскоростные синхронизаторы имеют статоры с множеством полюсов, поэтому их выходное напряжение проходит несколько циклов за один физический оборот. Для двухскоростных систем они не требуют передачи между валами.
Другая категория - дифференциальные синхронизаторы. Они имеют трехвыводные роторы и статоры, как статор, описанный выше, и могут быть передатчиками или приемниками. Дифференциальный передатчик подключается между синхронным передатчиком и приемником, и положение его вала добавляет (или вычитает, в зависимости от определения) угол, определенный передатчиком. Дифференциальный приемник подключен между двумя передатчиками и показывает сумму (или разность, опять же, как определено) между положениями валов двух передатчиков. Есть устройства, похожие на синхронизаторы, называемые трансольверами, что-то вроде дифференциальных синхронизаторов, но с трехвыводными роторами и четырехвыводными статорами.
А решатель похож на синхронизатор, но имеет статор с четырьмя выводами, причем обмотки физически разнесены на 90 градусов, а не на 120 градусов. Его ротор может быть синхронизирован или иметь два набора обмоток, разнесенных на 90 градусов. Хотя пара резолверов теоретически может работать как пара синхронизаторов, резолверы используются для вычислений.
Специальная схема трансформатора с Т-образным соединением, изобретенная Скоттом ("Скотт Т" ) интерфейсы между преобразователем и форматами синхронных данных; он был изобретен для соединения двухфазного переменного тока с трехфазным, но также может использоваться для точных приложений.
Смотрите также
Примечания
- ^ Goethals, Джордж W (1916). Панамский канал; Инженерный трактат. Серия статей, в которых подробно рассматриваются технические проблемы, связанные со строительством Панамского канала - геология, климатология, коммунальное хозяйство; Дноуглубительные работы, гидравлика, электростанции и т. Д. Подготовлено инженерами и другими специалистами, отвечающими за различные направления работ, и представлено на Международном инженерном конгрессе, Сан-Франциско, Калифорния. Нью-Йорк: Макгроу Хилл.
- ^ «Военно-морская артиллерия и артиллерийское дело, Том 1», 1957 год, Руководство ВМС США, Глава 10.
- ^ «МИЛ-ХДБК-225А, Synchros. Описание и работа", 25 марта 1991 г., ВМС, Вашингтон, округ Колумбия, стр. 1-2.]
- ^ «МИЛ-ХДБК-225А, Synchros. Описание и работа", 25 марта 1991 г., Военно-морское ведомство, Вашингтон, округ Колумбия, таблица 1, стр. 82.]
Рекомендации
- Измерительные преобразователи переменного тока
- Upson, A.R .; Бэтчелор, Дж. (1978) [1965]. Справочник по синхронной инженерии. Beckenham: Muirhead Vactric Components.
