Ограничения скорости бега животных - Limitations of animal running speed

Ограничения скорости бега животных дает обзор того, как различные факторы определяют максимальную Бег скорость. Некоторые наземные животные созданы для достижения чрезвычайно высоких скоростей, например, гепард, вилорог, раса лошадь и борзая, в то время как люди могут тренироваться, чтобы достичь высоких скоростей спринта. Не существует единого фактора, определяющего максимальную скорость бега: однако некоторые факторы отличаются от других и были исследованы как на животных, так и на людях. Эти факторы включают: мышечный момент рук, морфологию стопы, архитектуру мышц и тип мышечных волокон. Каждый фактор способствует сила реакции грунта (GRF) и время контакта стопы, изменение которого для увеличения максимальной скорости не у всех видов хорошо изучено.
Сила реакции земли и время контакта стопы
- GRF - распространенный вариант, который изучается при беговой походке. На людях было показано, что как скорость увеличивается, наблюдается линейное увеличение вертикального GRF.[1] GRF во время бега превышает вес тела, поэтому телом должна прилагаться дополнительная сила. В исследовании Weyand et al. Было показано, что более быстрые бегуны-люди достигают более высоких скоростей, применяя больший вертикальный GRF, а не увеличивая время поворота.[2] С гепардами дело обстоит иначе.
- Время контакта стопы или время стойки - это время, в течение которого стопа контактирует с землей. Имеются данные, свидетельствующие о том, что время контакта стопы у человека значительно уменьшается с увеличением скорости.[3]
- Было показано, что самые быстрые скорости достигаются, когда произведение времени контакта стопы и вертикального GRF уменьшается до минимума, который дает достаточно времени качающейся конечности, чтобы занять позицию для следующего шага.[3] Как GRF, так и время контакта стопы определяются такими переменными, как мышечный момент руки, морфология стопы, мышечный пучок длина и тип мышечного волокна.

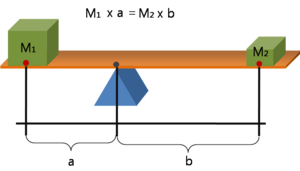
Мышечный момент руки
Мышцы момент рука определяется как перпендикулярное расстояние от линии действия мышцы до центра вращения сустава. Как правило, чем больше моментное плечо мышцы, тем больше крутящий момент он может производить с такой же силой. В то же время, мышца вызовет меньшее изменение угла сустава при таком же изменении длины. Например, удерживание гаечного ключа на самом конце рукоятки (точка B) облегчает ослабление болта, однако требует, чтобы ваша рука прошла большее расстояние по сравнению с удержанием гаечного ключа ближе к болту (точка A). Хотя и гепард, и борзая похожи по размеру, гепард может развивать скорость почти в два раза быстрее, чем борзая. Частично это можно объяснить тем, что руки и мышцы колена и голеностопного сустава у гепарда пропорционально больше, чем у борзой.[4] Аналогичное сравнение можно провести между двумя похожими видами ящерицы. Было обнаружено, что у гекконов, более приспособленных к лазанию, больше тазобедренных и плечевых ретракторов. Гекконы, приспособленные к горизонтальному движению, имеют большие руки-разгибатели в коленях и лодыжках.[5]
Морфология стопы
Морфология стопы в этом контексте в основном относится к соотношению передней части стопы (перед голеностопным суставом) и задней части стопы (позади голеностопного сустава). Это соотношение является показателем эффективного механическое преимущество (EMA), а также может быть представлена балансирующей пилой. Исследование, проведенное на людях, сравнивавшее структуру голеностопного сустава с помощью МРТ, показало, что у спринтеров более длинное соотношение передней и задней части стопы по сравнению с не спринтерами.[6] Это позволяет ступне дольше оставаться в контакте с землей, уменьшая при этом плечо момента. Это снижает скорость сокращения мышц и увеличивает силу, создаваемую мышцами-разгибателями во время фазы отталкивания.[7] Было показано, что эти более высокие передаточные числа во время фазы отталкивания встречаются у людей, ускоряющихся, а также у лучших спринтеров на животных.[4][6][8] Больший момент в руках гепарда может быть достигнут, если передняя часть стопы также пропорционально больше.
Архитектура мышц и тип волокон
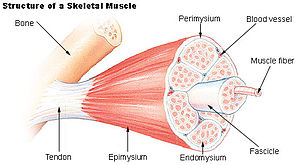
Оба архитектура и тип мышцы играют решающую роль в определении времени контакта стопы и выработки GRF. У людей было показано, что спринтеры имеют более длинные мышечные пучки и меньшие углы перистости, чем не спринтеры.[9][10] Это способствует увеличению скорости укорачивания мышцы. Другие исследования показали, что у спринтеров предпочтение отдается конкретным типам мышечных волокон, а не спринтерам, а также у спринтеров разного уровня. Более быстрые люди, как правило, имеют больший процент мышечных волокон типа II (быстро сокращающиеся).[11][12] Более высокий процент быстро сокращающихся мышечных волокон приводит к увеличению способности производства силы, а также к увеличению скорости сокращений, что приводит к более короткому времени контакта.
Другой
Также играют роль и другие факторы:
- Мышечная сила
- Более крупные мышцы способны генерировать большее количество силы и, следовательно, способны производить большие GRF.
- Эластичное накопление энергии
- Гепарды используют сгибание и разгибание позвоночника, чтобы значительно увеличить скорость за счет увеличения времени контакта ступни и времени поворота.[13]
Смотрите также
Рекомендации
- ^ Он, Дж. П., Р. Крам и др. (1991). «Механика бега в условиях малой гравитации». Журнал прикладной физиологии 71 (3): 863-870.
- ^ Weyand PG, Sternlight DB, Bellizzi MJ, Wright S. Более быстрые максимальные скорости бега достигаются с большими наземными силами, а не с более быстрыми движениями ног. J Appl Physiol 81: 1991–1999, 2000.
- ^ а б Weyand, P. G., R. F. Sandell, et al. (2010). «Биологические ограничения скорости бега вводятся с нуля». Журнал прикладной физиологии 108 (4): 950-961.
- ^ а б Hudson, P.E., S.A. Corr, et al. (2011). «Функциональная анатомия задней конечности гепарда (Acinonyx jubatus)». Журнал анатомии 218 (4): 363-374.
- ^ Зааф А., Херрел А. и др. (1999). «Морфология и морфометрия аппендикулярной мускулатуры гекконов с различными двигательными привычками (лепидозаврия)». Зооморфология 119 (1): 9-22.
- ^ а б Бакстер, Дж. Р., Т. А. Новак и др. (2012). «Механика голеностопного сустава и пропорции стопы у людей-спринтеров и не спринтеров различаются». Труды Королевского общества B: Биологические науки 279 (1735): 2018-2024.
- ^ Носитель, Д., Heglund, Н. & Графа, К. 1994 Переменные передаточный во время передвижения в опорно-двигательной системе человека. Science 265, 651–653.
- ^ Хильдебранд, М. 1994 Анализ строения позвоночных, 4-е изд. Нью-Йорк, штат Нью-Йорк: Дж. Вили.
- ^ Kumagai, K., T. Abe, et al. (2000). «Спринтерская результативность зависит от длины мышечного пучка у мужчин-спринтеров на 100 метров». Журнал прикладной физиологии 88 (3): 811-816.
- ^ Abe, T., Fukashiro, S., Harada, Y. & Kawamoto, K. 2001 Взаимосвязь между результатами спринта и длиной мышечного пучка у женщин-спринтеров. J. Physiol. Антрополь. Appl. Человек. Sci. 20, 141–147.
- ^ Маджумдар, А. и Р. Робергс (2011). «Наука о скорости: факторы, определяющие результативность в спринте на 100 м». Международный журнал спортивной науки и коучинга 6 (3): 479-494.
- ^ Садояма Т., Масуда Т., Мията Х. и Кацута С. 1988 Скорость проводимости волокон и состав волокон в латеральной широкой мышце бедра человека. Евро. J. Appl. Physiol. Ок. Physiol. 57, 767–771.
- ^ Хильдебранд, М. (1959). «Движения бегущего гепарда и лошади». Журнал маммологии 40 (4): 481-495.
внешняя ссылка
- Отделение кинезиологии - лаборатория биомеханики [1]
- Исследование для этой статьи в Википедии было проведено в рамках курса нейромеханики движения (APPH 6232), предлагаемого в Школе прикладной физиологии Технологического института Джорджии.