Походка - Gait

Походка это образец движение из конечности животных, в том числе люди, в течение движение над твердой подложкой. Большинство животных используют разные походки, выбирая походку в зависимости от скорости, местность, Нужно маневрировать, и энергетическая эффективность. Различные виды животных могут использовать разные походки из-за различий в анатомия которые мешают использовать определенные походки, или просто из-за сформировавшихся врожденных предпочтений в результате различий в среде обитания. Хотя разным походкам даны определенные имена, сложность биологических систем и взаимодействие с окружающей средой в лучшем случае делают эти различия «нечеткими». Походки обычно классифицируются в зависимости от модели шагов, но недавние исследования часто предпочитают определения, основанные на механике. Этот термин обычно не относится к движению на основе конечностей в текучих средах, таких как вода или воздух, а скорее к движению по твердому субстрату за счет создания противодействующих ему сил (что может относиться к ходьбе как под водой, так и на суше).
Из-за быстроты движения животных простого прямого наблюдения редко бывает достаточно, чтобы понять характер движения конечностей. Несмотря на ранние попытки классифицировать походку по отпечаткам или звуку шагов, это было не до тех пор, пока Эдверд Мейбридж и Этьен-Жюль Марей начал делать быстрые серии фотографий, чтобы можно было начать надлежащее научное изучение походки.
Обзор
Милтон Хильдебранд был пионером современного научного анализа и классификации походок. Движение каждой конечности было разделено на фазу стойки, когда ступня соприкасалась с землей, и фазу поворота, когда ступня поднималась и двигалась вперед.[1][2] Каждая конечность должна заполнить цикл за такой же отрезок времени, в противном случае отношения одной конечности к другим могут измениться со временем, и устойчивый образец не может возникнуть. Таким образом, любая походка может быть полностью описана в терминах начала и конца фазы стояния трех конечностей по отношению к циклу опорной конечности, как правило, левой задняя конечность.
Переменные
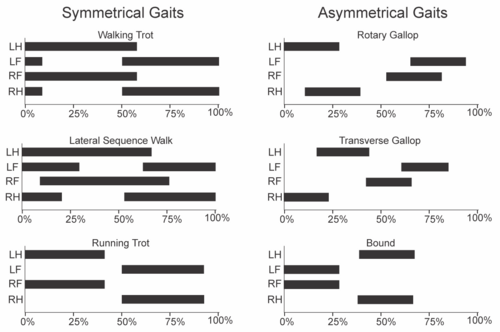
Походки обычно классифицируются как «симметричные» и «асимметричные» в зависимости от движений конечностей. Важно отметить, что эти термины не имеют ничего общего с лево-правая симметрия. При симметричной походке левая и правая конечности пары чередуются, а при асимметричной походке конечности движутся вместе. Асимметричную походку иногда называют «прыжковой походкой» из-за наличия приостановленной фазы.
Ключ переменные для походки - коэффициент заполнения и передняя конечность - фазовое соотношение задних конечностей. Коэффициент нагрузки - это просто процент от общего цикла, в течение которого данная ступня находится на земле. Это значение обычно будет одинаковым для передних и задних конечностей, если только животное не движется специально обученной походкой или не двигается. ускорение или замедление. Коэффициент заполнения более 50% считается "прогулкой", а коэффициент ниже 50% считается бегом. Фаза передних и задних конечностей - это временный отношения между парами конечностей. Если передние и задние конечности на одной и той же стороне начинают фазу стойки одновременно, фаза равна 0 (или 100%). Если передняя конечность с той же стороны касается земли на половину цикла позже, чем задняя, фаза составляет 50%.
Физиологические эффекты походки
Выбор походки может иметь эффекты, помимо немедленных изменений в движении и скорости конечностей, особенно с точки зрения вентиляция. Потому что им не хватает диафрагма, ящерицы и саламандры должны расширяться и сжимать стенки своего тела, чтобы заставить воздух входить и выходить из своих легких, но это те же самые мышцы, которые используются для боковых волнообразных движений тела во время движения. Таким образом, они не могут двигаться и дышать одновременно, такая ситуация называется Ограничение перевозчика, хотя некоторые, например варан, можно обойти это ограничение с помощью буккальное откачивание. Напротив, сгибание позвоночника у скачущего галопом млекопитающего вызывает брюшную полость. внутренности действовать как поршень, раздувая и сдувая легкие, когда позвоночник животного изгибается и расширяется, увеличивая вентиляцию и позволяя кислородный обмен.
Различия между видами


Любое животное использует относительно ограниченный набор походок, а разные виды используют разные походки. Почти все животные способны к симметричной походке, в то время как асимметричная походка в основном ограничивается млекопитающие, которые способны на достаточно позвоночник сгибание для увеличения длины шага (хотя и небольшое крокодилы могут использовать ограничивающую походку). Боковая последовательность походок при ходьбе и беге чаще всего встречаются у млекопитающих,[3] но древесный млекопитающие, такие как обезьяны, немного опоссумы, и кинкажу Для большей устойчивости используйте прогулки по диагонали.[3] Прогулки и пробежки в диагональной последовательности (также известные как рысь) чаще всего используются растягиванием. четвероногие такие как саламандры и ящерицы из-за боковых колебаний их тел во время движения. Двуногие являются уникальным случаем, и большинство двуногих во время естественного передвижения демонстрируют только три аллюра - ходьбу, бег и прыжки. Другие походки, такие как прыжки человека, не используются без преднамеренных усилий.
Классификация походки на основе энергии
Хотя походки можно классифицировать по шагам, новая работа с участием всего тела кинематика и записи силовых пластин породили альтернативную схему классификации, основанную на механике движение. В этой схеме движения делятся на ходьбу и бег. Все ходочные походки характеризуются "прыжковым" движением тела над ногами, часто описываемым как перевернутый маятник (отображающий колебания кинетики и потенциальная энергия которые не совпадают по фазе), механизм, описанный Джованни Каванья. При беге кинетическая и потенциальная энергия колеблются синфазно, и изменение энергии передается на мышцы, кости, сухожилия и связки действуют как пружины (таким образом, это описывается пружинно-массовая модель ).
Энергетика

Скорость обычно определяет выбор походки, при этом четвероногий млекопитающие переходят от ходьбы к бегу к галопу с увеличением скорости. Каждая из этих походок имеет оптимальную скорость, при которой расходуется минимум калорий на метр, а затраты увеличиваются при более медленных или более высоких скоростях. Переходы походки происходят примерно на той скорости, когда стоимость быстрой ходьбы становится выше, чем стоимость медленного бега. Необузданные животные обычно двигаются с оптимальной скоростью для их походки, чтобы минимизировать затраты энергии. В стоимость транспорта используется для сравнения энергетики разных походок, а также походок разных животных.
Походки без четвероногих
Несмотря на различия в количестве ног, показанных на земной позвоночные, согласно перевернутый маятник модель ходьбы и пружина Модель бега, «прогулки» и «бег» наблюдаются у животных с 2, 4, 6 и более ногами. Термин «походка» даже применялся к летающим и плавающим организмам, которые производят различные модели следа. вихри.
Смотрите также
- Цикл двуногой походки
- Анализ походки
- Нарушение походки
- Походка (собака)
- Походка (человек)
- Походка лошади
- Паркинсоническая походка
использованная литература
- ^ Хильдебранд, Милтон (1 декабря 1989 г.). «Походки четвероногих позвоночных: время движений ног зависит от баланса, формы тела, ловкости, скорости и расхода энергии». Бионаука. 39 (11): 766. Дои:10.2307/1311182. JSTOR 1311182.
- ^ Tasch, U .; Moubarak, P .; Tang, W .; Zhu, L .; Lovering, R.M .; Roche, J .; Блох, Р. Дж. (2008). Том 2: Автомобильные системы; Биоинженерия и биомедицинские технологии; Вычислительная механика; Органы управления; Динамические системы. С. 45–49. Дои:10.1115 / ESDA2008-59085. ISBN 978-0-7918-4836-4.
- ^ а б Лемелин П., Шмитт Д. и Картмилл М. 2003. Образцы шагов и межконечностная координация у опоссумов (семейство Didelphidae): свидетельства эволюции ходьбы по диагонали у приматов. J. Zool. Лондон. 260: 423-429. Веб-ссылка на pdf
Эта статья включает в себя список общих использованная литература, но он остается в основном непроверенным, потому что ему не хватает соответствующих встроенные цитаты. (Август 2009 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
- Хильдебранд, М. (1989). "Передвижение позвоночных: введение, как тело животного движется?". Бионаука. 39 (11): 764–765. Дои:10.1093 / биология / 39.11.764. JSTOR 1311182.
- Hoyt, D. F .; Тейлор, Р. К. (1981). «Походка и энергетика передвижения лошадей». Природа. 292 (5820): 239–240. Дои:10.1038 / 292239a0. S2CID 26841475.
- Кэрриер, Д. (1987). «Вентиляция легких при ходьбе и беге у четырех видов ящериц». Экспериментальная биология. 47 (1): 33–42. PMID 3666097.
- Брамбл, Д. М .; Кэрриер, Д. Р. (1983). «Бег и дыхание у млекопитающих». Наука. 219 (4582): 251–256. Дои:10.1126 / science.6849136. PMID 6849136. S2CID 23551439.
- Blickhan, R .; Полный, Р. Дж. (1993). «Сходство в многоногом передвижении: подпрыгивание, как монопод». Журнал сравнительной физиологии А. 173 (5): 509–517. Дои:10.1007 / bf00197760. S2CID 19751464.
- Cavagna, G.A .; Heglund, N.C .; Тейлор, Р. К. (1977). «Механическая работа при передвижении по земле: два основных механизма минимизации затрат энергии». Am. J. Physiol. 233 (5): R243 – R261. Дои:10.1152 / ajpregu.1977.233.5.R243. PMID 411381. S2CID 15842774.
| Плавники |  | |
|---|---|---|
| Конечности | ||
| Крылья | ||
| Эволюция | ||
| Связанный | ||