Кинематика - Kinematics - Wikipedia
| Часть серии по |
| Классическая механика |
|---|
Основные темы |
Категории ► Классическая механика |

Кинематика это раздел физики, разработанный в классическая механика, описывающий движение точек, тел (объектов) и систем тел (групп объектов) без учета сил, которые заставляют их двигаться.[1][2][3] Кинематика, как область исследований, часто упоминается как «геометрия движения» и иногда рассматривается как раздел математики.[4][5][6] Проблема кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и / или ускорения точек в системе. Затем, используя аргументы из геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, подпадает под кинетика, а не кинематика. Подробнее см. аналитическая динамика.
Кинематика используется в астрофизика описать движение небесные тела и коллекции таких тел. В машиностроение, робототехника, и биомеханика[7] кинематика используется для описания движения систем, состоящих из соединенных частей (многозвенные системы), таких как двигатель, а роботизированная рука или скелет человека.
Геометрические преобразования, также называемые жесткие преобразования, используются для описания движения компонентов в механическая система, упрощая вывод уравнений движения. Они также занимают центральное место в динамический анализ.
Кинематический анализ это процесс измерения кинематические величины используется для описания движения. В инженерии, например, кинематический анализ может использоваться для определения диапазона движения для данного механизм и работая в обратном направлении, используя кинематический синтез разработать механизм для желаемого диапазона движения.[8] Кроме того, кинематика применяется алгебраическая геометрия к изучению механическое преимущество из механическая система или механизм.
Этимология термина
Термин кинематика - это английская версия ЯВЛЯЮСЬ. Ампер с синематик,[9] который он построил из Греческий κίνημα кино ("движение, движение"), происходящее от κινεῖν кинеин ("двигаться").[10][11]
Кинематика и cinématique связаны с французским словом cinéma, но ни одно из них не происходит напрямую от него. Однако у них действительно есть общий корень, поскольку cinéma произошло от сокращенной формы cinématographe, «кинопроектор и камера», опять же от греческого слова «движение» и от греческого γρᾰ́φω графо ("написать").[12]
Кинематика траектории частицы в невращающейся системе отсчета




Кинематика частиц - это исследование траектории движения частиц. Положение частицы определяется как вектор координат от начала системы координат до частицы. Например, представьте себе башню в 50 м к югу от вашего дома, где система координат центрируется в вашем доме, так что восток находится в направлении Икс- ось и север в направлении у-оси, то вектор координат до основания башни равен р = (0, −50 м, 0). Если высота башни 50 м, и эта высота измеряется по z-оси, то вектор координат до вершины башни равен р = (0, −50 м, 50 м).
В самом общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица вынуждена двигаться в пределах плоскости, двумерной системы координат будет достаточно. Все наблюдения в физике неполны без описания в системе отсчета.
Вектор положения частицы - это вектор нарисованный от начала системы отсчета до частицы. Он выражает как расстояние точки от начала координат, так и направление от начала координат. В трех измерениях вектор положения можно выразить как


куда , , и являются Декартовы координаты и , и - единичные векторы вдоль , , и оси координат соответственно. Величина вектора положения дает расстояние между точками и происхождение.









В направляющие косинусы вектора положения обеспечивают количественную меру направления. В общем, вектор положения объекта будет зависеть от системы отсчета; разные кадры приведут к разным значениям вектора положения.
В траектория частицы является векторной функцией времени, , который определяет кривую, идущую от движущейся частицы, заданную формулой


куда , , и описать каждую координату положения частицы как функцию времени.



Скорость и скорость
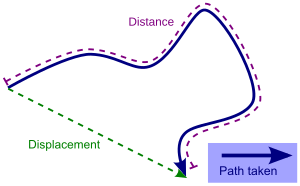
В скорость частицы - это векторная величина, которая описывает как величину, так и направление движения частицы. Говоря более математически, скорость изменения вектора положения точки относительно времени - это скорость точки. Рассмотрим соотношение, образованное делением разности двух положений частицы на временной интервал. Это отношение называется средней скоростью за этот интервал времени и определяется как

куда - изменение вектора положения за интервал времени . В пределах того, что временной интервал стремится к нулю, средняя скорость приближается к мгновенной скорости, определяемой как производная по времени вектора положения,



где точка обозначает производную по времени (например, ). Таким образом, скорость частицы - это скорость изменения ее положения во времени. Кроме того, эта скорость равна касательная к траектории частицы в каждой точке ее пути. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.

В скорость объекта - это величина его скорости. Это скалярная величина:

куда - длина дуги, измеренная вдоль траектории частицы. Эта длина дуги всегда должна увеличиваться по мере движения частицы. Следовательно, неотрицательно, что означает, что скорость также неотрицательна.


Ускорение
Вектор скорости может изменяться по величине и по направлению или по обоим сразу. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. То же рассуждение, которое используется в отношении положения частицы для определения скорости, может быть применено к скорости для определения ускорения. В ускорение частицы - это вектор, определяемый скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как отношение.

где ΔV - разность вектора скорости и Δт - временной интервал.
Ускорение частицы - это предел среднего ускорения, когда временной интервал приближается к нулю, который является производной по времени,

или же

Таким образом, ускорение - это первая производная вектора скорости и вторая производная вектора положения этой частицы. Обратите внимание, что в невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
Величина ускорение объекта величина |А| вектора его ускорения. Это скалярная величина:

Вектор относительного положения
Вектор относительного положения вектор, определяющий положение одной точки относительно другой. Это разница в положении двух точек. Положение одной точки А относительно другой точки B просто разница между их позициями

которая является разницей между компонентами их векторов положения.
Если точка А имеет компоненты позиции

Если точка B имеет компоненты позиции

тогда положение точки А относительно точки B разница между их составляющими:

Относительная скорость
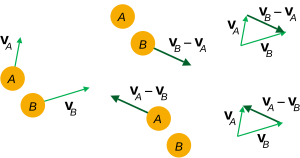
Скорость одной точки относительно другой - это просто разница между их скоростями.

что есть разница между составляющими их скоростей.
Если точка А имеет компоненты скорости

и указать B имеет компоненты скорости

тогда скорость точки А относительно точки B разница между их составляющими:

В качестве альтернативы тот же результат может быть получен путем вычисления производной по времени вектора относительного положения. рБ / А.
В случае, когда скорость близка к скорость света c (обычно в пределах 95%), другая схема относительной скорости называется быстрота, который зависит от отношения V к c, используется в специальная теория относительности.
Относительное ускорение
Ускорение на одну точку C относительно другой точки B просто разница между их ускорениями.

что и есть разница между составляющими их ускорений.
Если точка C имеет компоненты ускорения

и указать B имеет компоненты ускорения

затем ускорение точки C относительно точки B разница между их составляющими:

В качестве альтернативы тот же результат может быть получен путем вычисления второй производной по времени вектора относительного положения. пБ / А.[13]
Предполагая, что начальные условия позиции, , и скорость вовремя известны, первое интегрирование дает скорость частицы как функцию времени.




Второе интегрирование дает его путь (траекторию),

Могут быть получены дополнительные соотношения между перемещением, скоростью, ускорением и временем. Поскольку ускорение постоянно,
- можно подставить в приведенное выше уравнение, чтобы получить:


Связь между скоростью, положением и ускорением без явной зависимости от времени может быть получена путем решения среднего ускорения для времени и замены и упрощения


где ∘ обозначает скалярное произведение, что уместно, поскольку продукты являются скалярами, а не векторами.

Точку можно заменить косинусом угла α между векторами[нужна цитата ] и векторы по их величине, и в этом случае:

В случае ускорения всегда в направлении движения, а направление движения должно быть положительным или отрицательным, угол между векторами (α) равно 0, поэтому , и


Это можно упростить, используя обозначения величин векторов [нужна цитата ] куда может быть любой извилистой траекторией, поскольку вдоль этого пути применяется постоянное тангенциальное ускорение[нужна цитата ], так



Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Это соотношение полезно, когда время неизвестно. Мы также знаем, что или же площадь под графиком v, t.[14]


Мы можем взять добавив верхнюю и нижнюю области. Нижняя область представляет собой прямоугольник, а площадь прямоугольника - это куда это ширина и это высота.[15] В этом случае и (обратите внимание, что здесь отличается от разгона ). Это означает, что нижняя часть . Теперь найдем верхнюю область (треугольник). Площадь траншеи составляет куда это база и это высота.[16] В этом случае, & или же . Добавление и приводит к уравнению приводит к уравнению .[17] Это уравнение очень полезно, когда конечная скорость v неизвестно.














Траектории частиц в цилиндрическо-полярных координатах
Часто бывает удобно сформулировать траекторию частицы п(t) = (X (t), Y (t) и Z (t)) с использованием полярных координат в Икс–Y самолет. В этом случае его скорость и ускорение принимают удобный вид.
Напомним, что траектория частицы п определяется своим координатным вектором п измеряется в фиксированной системе отсчета F. При движении частицы ее координатный вектор п(t) отслеживает свою траекторию, которая представляет собой кривую в пространстве, заданную формулой:

куда я, j, и k - единичные векторы вдоль Икс, Y и Z оси система отсчета F, соответственно.
Рассмотрим частицу п который движется только по поверхности кругового цилиндра R (t) = constant, можно выровнять Z ось неподвижной рамы F с осью цилиндра. Тогда угол θ вокруг этой оси в Икс–Y плоскости можно использовать для определения траектории как,

Цилиндрические координаты для п(t) можно упростить, введя единичные радиальные и тангенциальные векторы:

и их производные по времени из элементарного исчисления:


- .


Используя это обозначение, п(t) принимает вид

куда р постоянна в случае движения частицы только по поверхности цилиндра радиуса р.
В целом траектория п(t) не ограничен лежать на круговом цилиндре, поэтому радиус р изменяется со временем, и траектория частицы в цилиндрическо-полярных координатах принимает вид:

Где R, тета и Z могут быть непрерывно дифференцируемыми функциями времени, а обозначение функции опускается для простоты. Вектор скорости Vп - производная по времени траектории п(t), что дает:
- .

Аналогично ускорение Ап, которая является производной по времени от скорости Vп, дан кем-то:

Период, термин действует по направлению к центру кривизны траектории в этой точке траектории, что обычно называется центростремительным ускорением. Период, термин называется ускорением Кориолиса.


Постоянный радиус
Если траектория частицы должна лежать на цилиндре, то радиус р постоянна, а векторы скорости и ускорения упрощаются. Скорость Vп - производная по времени траектории п(т),

Вектор ускорения принимает вид:

Плоские круговые траектории
Частный случай траектории частицы на круговом цилиндре возникает, когда нет движения по Z ось:

куда р и Z0 являются константами. В этом случае скорость Vп дан кем-то:

куда

это угловая скорость единичного вектора еθ вокруг z ось цилиндра.
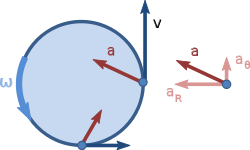
Ускорение Ап частицы п теперь выдается:

Компоненты

называются соответственно радиальный и тангенциальные компоненты ускорения.
Обозначения для угловой скорости и угловое ускорение часто определяется как

поэтому компоненты радиального и тангенциального ускорения для круговых траекторий также записываются как

Точечные траектории в теле, движущемся в плоскости
Движение компонентов механическая система анализируются путем присоединения система отсчета к каждой части и определения того, как различные опорные системы перемещаются относительно друг друга. Если структурная жесткость деталей достаточна, то их деформацией можно пренебречь и использовать жесткие преобразования для определения этого относительного движения. Это сводит описание движения различных частей сложной механической системы к задаче описания геометрии каждой части и геометрической ассоциации каждой части относительно других частей.
Геометрия - это изучение свойств фигур, которые остаются неизменными, пока пространство трансформируется различными способами, а точнее говоря, это изучение инвариантов относительно набора преобразований.[19] Эти преобразования могут вызвать смещение треугольника в плоскости, при этом угол вершины и расстояния между вершинами остаются неизменными. Кинематику часто называют прикладной геометрией, в которой движение механической системы описывается с помощью жестких преобразований евклидовой геометрии.
Координаты точек на плоскости - это двумерные векторы в р2 (двухмерное пространство). Жесткие преобразования - это те, которые сохраняют расстояние между любыми двумя точками. Множество жестких преобразований в п-мерное пространство называется особым Евклидова группа на рп, и обозначил SE (п).
Смещения и движение

Положение одного компонента механической системы относительно другого определяется введением система отсчета, сказать M, на той, которая движется относительно неподвижной рамы, F, с другой. Жесткое преобразование или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации вращение и перевод.
Множество всех перемещений M относительно F называется конфигурационное пространство из М. Плавная кривая из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывный набор перемещений, называемый движение из M относительно Ф. Движение тела состоит из непрерывного набора вращений и поступлений.
Матричное представление
Сочетание поворота и перевода в плоскости р2 может быть представлена матрицей 3x3 определенного типа, известной как однородное преобразование. Однородное преобразование 3x3 строится из 2x2 матрица вращения A (φ) и вектор сдвига 2x1 d= (dИкс, dу), в качестве:
![{ displaystyle [T ( phi, mathbf {d})] = { begin {bmatrix} A ( phi) & mathbf {d} 0 & 1 end {bmatrix}} = { begin {bmatrix} cos phi & - sin phi & d_ {x} sin phi & cos phi & d_ {y} 0 & 0 & 1 end {bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf7c55c3676dc5465e5080d069c2698afcdaa9f4)
Эти однородные преобразования выполняют жесткие преобразования в точках плоскости z = 1, то есть в точках с координатами п= (х, у, 1).
В частности, пусть п определить координаты точек в системе отсчета M совпадает с фиксированной рамкой Ф. Тогда, когда происхождение M смещается вектором трансляции d относительно происхождения F и повернут на угол φ относительно оси x F, новые координаты в F очков в M даны:
![{ textbf {P}} = [T ( phi, mathbf {d})] { textbf {p}} = { begin {bmatrix} cos phi & - sin phi & d_ {x} sin phi & cos phi & d_ {y} 0 & 0 & 1 end {bmatrix}} { begin {Bmatrix} x y 1 end {Bmatrix}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/afd8c2abef5c4efdb4c462f4620c487e731db73b)
Однородные преобразования представляют аффинные преобразования. Эта формулировка необходима, потому что перевод это не линейное преобразование из р2. Однако, используя проективную геометрию, так что р2 считается подмножеством р3, переводы становятся аффинными линейными преобразованиями.[20]
Чистый перевод
Если твердое тело движется так, что его система отсчета M не вращается (∅ = 0) относительно неподвижной рамки F, движение называется чистым переводом. В этом случае траектория каждой точки тела является смещением траектории d(t) происхождения М, то есть:
![{ textbf {P}} (t) = [T (0, { textbf {d}} (t))] { textbf {p}} = { textbf {d}} (t) + { textbf {п}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b17768bbc7399bbf040eec0df48a1f5850c6ff0)
Таким образом, для тел в чистом перемещении скорость и ускорение каждой точки п в организме представлены:

где точка обозначает производную по времени, а VО и АО - скорость и ускорение начала движущейся системы отсчета соответственно M. Напомним координатный вектор п в M постоянна, поэтому его производная равна нулю.
Вращение тела вокруг фиксированной оси
Вращательная или угловая кинематика - это описание вращения объекта.[21] Описание вращения требует некоторого метода описания ориентации. Общие описания включают Углы Эйлера и кинематика поворотов индуцированные алгебраическими произведениями.
В дальнейшем мы ограничимся простым вращением вокруг оси фиксированной ориентации. В z- ось выбрана для удобства.
- Позиция
- Это позволяет описывать вращение как угловое положение плоской системы отсчета. M относительно фиксированного F об этом поделился z-ось. Координаты п = (Икс, у) в M связаны с координатами п = (X, Y) в F матричным уравнением:
- куда
- матрица вращения, определяющая угловое положение M относительно F как функция времени.
![mathbf {P} (t) = [A (t)] mathbf {p},](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
![[A (t)] = { begin {bmatrix} cos theta (t) & - sin theta (t) sin theta (t) & cos theta (t) end {bmatrix }},](https://wikimedia.org/api/rest_v1/media/math/render/svg/94fc0456d06fb0809c059a7254b050dc3418b7a4)
- Скорость
- Если точка п не въезжает M, его скорость в F дан кем-то
![mathbf {V} _ {P} = { dot { mathbf {P}}} = [{ dot {A}} (t)] mathbf {p}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0d7793387eb9ae622071c127994fdb51df9c29c)
- Удобно исключить координаты п и запишем это как операцию на траектории п(т),
- где матрица
- известна как матрица угловой скорости M относительно F. Параметр ω - это производная по времени от угла θ, то есть:
![mathbf {V} _ {P} = [{ dot {A}} (t)] [A (t) ^ {- 1}] mathbf {P} = [ Omega] mathbf {P},](https://wikimedia.org/api/rest_v1/media/math/render/svg/039da2a7b7b917fb70b30cf2b0fda97ac943071c)
![[ Omega] = { begin {bmatrix} 0 & - omega omega & 0 end {bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

- Ускорение
- Ускорение п(банка F получается как производная по времени от скорости,
- который становится
- куда
- матрица углового ускорения M на F, и
![mathbf {A} _ {P} = { ddot {P}} (t) = [{ dot { Omega}}] mathbf {P} + [ Omega] { dot { mathbf {P} }},](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![mathbf {A} _ {P} = [{ dot { Omega}}] mathbf {P} + [ Omega] [ Omega] mathbf {P},](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![[{ dot { Omega}}] = { begin {bmatrix} 0 & - alpha alpha & 0 end {bmatrix}},](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)

Затем описание вращения включает в себя эти три величины:
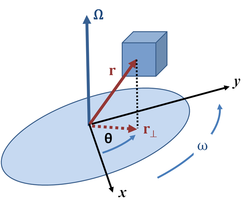
- Угловое положение : ориентированное расстояние от выбранной исходной точки на оси вращения до точки объекта является вектором р ( т ) определение точки. Вектор р(т) имеет некоторую проекцию (или, что то же самое, некоторую составляющую) р⊥(т) на плоскости, перпендикулярной оси вращения. Тогда угловое положение этой точки - угол θ от исходной оси (обычно положительный Икс-ось) к вектору р⊥(т) в известном направлении вращения (обычно задается правило правой руки ).
- Угловая скорость : угловая скорость ω скорость, с которой угловое положение θ изменяется по времени t:
- Угловая скорость представлена на рисунке 1 вектором Ω указывающий вдоль оси вращения с величиной ω и чувство определяется направлением вращения, заданным правило правой руки.

- Угловое ускорение : величина углового ускорения α - скорость, с которой угловая скорость ω изменяется по времени t:

Уравнения поступательной кинематики можно легко распространить на плоскую кинематику вращения для постоянного углового ускорения с простой заменой переменных:




Здесь θя и θж - соответственно начальное и конечное угловые положения, ωя и ωж - соответственно начальная и конечная угловые скорости, α - постоянное угловое ускорение. Хотя положение в пространстве и скорость в пространстве являются истинными векторами (с точки зрения их свойств при вращении), как и угловая скорость, сам угол не является истинным вектором.
Точечные траектории движения тела в трех измерениях
Важные формулы кинематики определяют скорость и ускорение точек движущегося тела, когда они отслеживают траектории в трехмерном пространстве. Это особенно важно для центра масс тела, который используется для вывода уравнений движения с использованием либо Второй закон Ньютона или же Уравнения Лагранжа.
Позиция
Чтобы определить эти формулы, движение компонента B механической системы определяется набором вращений [A (t)] и перемещений d(t) собраны в однородное преобразование [T (t)] = [A (t), d(t)]. Если п это координаты точки п в B измеряется в движении система отсчета M, то траектория этой точки, проведенная в F дан кем-то:
![{ textbf {P}} (t) = [T (t)] { textbf {p}} = { begin {Bmatrix} { textbf {P}} 1 end {Bmatrix}} = { begin {bmatrix} A (t) & { textbf {d}} (t) 0 & 1 end {bmatrix}} { begin {Bmatrix} { textbf {p}} 1 end {Bmatrix}} .](https://wikimedia.org/api/rest_v1/media/math/render/svg/3cc9d74ee582380c56109e1e32c66861c1199c82)
Это обозначение не различает п = (X, Y, Z, 1) и п = (X, Y, Z), что, надеюсь, понятно в контексте.
Это уравнение для траектории движения п может быть инвертирован для вычисления координатного вектора п в M в качестве:
![{ textbf {p}} = [T (t)] ^ {- 1} { textbf {P}} (t) = { begin {Bmatrix} { textbf {p}} 1 end {Bmatrix }} = { begin {bmatrix} A (t) ^ {T} & - A (t) ^ {T} { textbf {d}} (t) 0 & 1 end {bmatrix}} { begin { Bmatrix} { textbf {P}} (t) 1 end {Bmatrix}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/56a7932994e2d94e2eec8a72b30d203b59f3fbd2)
В этом выражении используется тот факт, что транспонирование матрицы вращения также является обратным ей, то есть:
![[A (t)] ^ {T} [A (t)] = I. !](https://wikimedia.org/api/rest_v1/media/math/render/svg/508984f6b63ea2650ace9fc734f8a7b511678db4)
Скорость
Скорость точки п по своей траектории п(t) получается как производная по времени этого вектора положения,
![{ displaystyle { textbf {V}} _ {P} = [{ dot {T}} (t)] { textbf {p}} = { begin {Bmatrix} { textbf {V}} _ { P} 0 end {Bmatrix}} = { dot { begin {bmatrix} A (t) & { textbf {d}} (t) 0 & 1 end {bmatrix}}} { begin { Bmatrix} { textbf {p}} 1 end {Bmatrix}} = { begin {bmatrix} { dot {A}} (t) & { dot { textbf {d}}} (t) 0 & 0 end {bmatrix}} { begin {Bmatrix} { textbf {p}} 1 end {Bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0ac1f7628ed7e9f6d406fbeea3cfceb77889a34b)
Точка обозначает производную по времени; потому что п постоянна, ее производная равна нулю.
Эту формулу можно изменить, чтобы получить скорость п действуя по его траектории п(t) в неподвижной раме F. Подставляя обратное преобразование за п в уравнение скорости дает:
![{ displaystyle { begin {align} { textbf {V}} _ {P} = [{ dot {T}} (t)] [T (t)] ^ {- 1} { textbf {P} } (t) = { begin {Bmatrix} { textbf {V}} _ {P} 0 end {Bmatrix}} & = { begin {bmatrix} { dot {A}} & { dot { textbf {d}}} 0 & 0 end {bmatrix}} { begin {bmatrix} A & { textbf {d}} 0 & 1 end {bmatrix}} ^ {- 1} { begin {Bmatrix } { textbf {P}} (t) 1 end {Bmatrix}} & = { begin {bmatrix} { dot {A}} & { dot { textbf {d}}} 0 & 0 end {bmatrix}} A ^ {- 1} { begin {bmatrix} 1 & - { textbf {d}} 0 & A end {bmatrix}} { begin {Bmatrix} { textbf {P} } (t) 1 end {Bmatrix}} & = { begin {bmatrix} { dot {A}} A ^ {- 1} & - { dot {A}} A ^ {- 1 } { textbf {d}} + { dot { textbf {d}}} 0 & 0 end {bmatrix}} { begin {Bmatrix} { textbf {P}} (t) 1 end {Bmatrix}} & = { begin {bmatrix} { dot {A}} A ^ {T} & - { dot {A}} A ^ {T} { textbf {d}} + { точка { textbf {d}}} 0 & 0 end {bmatrix}} { begin {Bmatrix} { textbf {P}} (t) 1 end {Bmatrix}} { textbf {V }} _ {P} & = [S] { textbf {P}}. End {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec484fb25c124cc0cd2d1ddd14e64b6a3443f1e7)
Матрица [S] определяется выражением:
![[S] = { begin {bmatrix} Omega & - Omega { textbf {d}} + { dot { textbf {d}}} 0 & 0 end {bmatrix}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7230e2e401b39c45d00561d8c765bee71926e10a)
куда
![[ Omega] = { dot {A}} A ^ {T},](https://wikimedia.org/api/rest_v1/media/math/render/svg/0c3cd8274e1618399a3496683894c48cd3f7779c)
- матрица угловой скорости.
Умножая на оператор [S], формула для скорости Vп принимает форму:
![{ textbf {V}} _ {P} = [ Omega] ({ textbf {P}} - { textbf {d}}) + { dot { textbf {d}}} = omega times { textbf {R}} _ {P / O} + { textbf {V}} _ {O},](https://wikimedia.org/api/rest_v1/media/math/render/svg/d330c0a18f9c9378712831b82f296dd80aa423b7)
где вектор ω - вектор угловой скорости, полученный из компонент матрицы [Ω]; вектор

позиция п относительно происхождения О подвижной рамы M; и

- скорость начала координат О.
Ускорение
Ускорение точки п в движущемся теле B получается как производная по времени его вектора скорости:
![{ textbf {A}} _ {P} = { frac {d} {dt}} { textbf {V}} _ {P} = { frac {d} {dt}} { big (} [ S] { textbf {P}} { big)} = [{ dot {S}}] { textbf {P}} + [S] { dot { textbf {P}}} = [{ точка {S}}] { textbf {P}} + [S] [S] { textbf {P}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/c7e695b78214c157cd014a34ee46ed52002c9a1b)
Это уравнение можно расширить, сначала вычислив
![[{ dot {S}}] = { begin {bmatrix} { dot { Omega}} & - { dot { Omega}} { textbf {d}} - Omega { dot { textbf {d}}} + { ddot { textbf {d}}} 0 & 0 end {bmatrix}} = { begin {bmatrix} { dot { Omega}} & - { dot { Omega} } { textbf {d}} - Omega { textbf {V}} _ {O} + { textbf {A}} _ {O} 0 & 0 end {bmatrix}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8faf23db7736a3166cf616169f01b34a1b202ce9)
и
![[S] ^ {2} = { begin {bmatrix} Omega & - Omega { textbf {d}} + { textbf {V}} _ {O} 0 & 0 end {bmatrix}} ^ { 2} = { begin {bmatrix} Omega ^ {2} & - Omega ^ {2} { textbf {d}} + Omega { textbf {V}} _ {O} 0 & 0 end { bmatrix}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/50af6af80d11abf0557381f6ffca02251ff99638)
Формула ускорения Ап теперь можно получить как:

или же

где α - вектор углового ускорения, полученный из производной матрицы угловой скорости;
- вектор относительного положения (положение п относительно происхождения О подвижной рамы M); и

- ускорение начала движущейся системы отсчета M.
Кинематические ограничения
Кинематические ограничения - это ограничения на движение компонентов механической системы. Можно считать, что кинематические ограничения имеют две основные формы: (i) ограничения, возникающие из шарниров, ползунов и кулачковых соединений, которые определяют конструкцию системы, называемые голономные ограничения и (ii) ограничения, накладываемые на скорость системы, такие как ограничение лезвия коньков на плоской плоскости или качение без проскальзывания диска или сферы в контакте с плоскостью, которые называются неголономные ограничения. Ниже приведены некоторые общие примеры.
Кинематическая муфта
А кинематическая муфта точно ограничивает все 6 степеней свободы.
Катится без скольжения
Предмет, который катится по поверхность без скольжения подчиняется условию, что скорость своего центр массы равно перекрестное произведение его угловой скорости с вектором от точки касания к центру масс:

В случае объекта, который не наклоняется и не поворачивается, это сводится к .

Неэластичный шнур
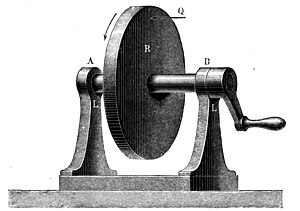
Это тот случай, когда тела соединены идеализированным шнуром, который остается натянутым и не может менять длину. Ограничение состоит в том, что сумма длин всех сегментов шнура равна общей длине, и, соответственно, производная по времени этой суммы равна нулю.[22][23][24] Динамической задачей этого типа является маятник. Другой пример - барабан, который вращается под действием силы тяжести при падающем грузе, прикрепленном к ободу нерастяжимым шнуром.[25] An равновесие проблема (т.е. не кинематическая) этого типа - цепная связь.[26]
Кинематические пары
Рило назвал идеальные связи между компонентами, составляющими машину кинематические пары. Он проводил различие между более высокими парами, которые, как говорят, имеют линейный контакт между двумя звеньями, и нижними парами, которые имеют контакт по площади между звеньями. Дж. Филлипс показывает, что существует множество способов построения пар, которые не подходят для этой простой классификации.[27]
Нижняя пара
Нижняя пара - это идеальное соединение или голономная связь, которая поддерживает контакт между точкой, линией или плоскостью в движущемся твердом (трехмерном) теле с соответствующей точечной линией или плоскостью в неподвижном твердом теле. Возможны следующие случаи:
- Поворотная пара или шарнирное соединение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, поддерживала контакт с аналогичной перпендикулярной плоскостью. в неподвижном теле. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы, которая представляет собой чистое вращение вокруг оси шарнира.
- Призматический шарнир или ползун требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, поддерживала контакт с аналогичной параллельной плоскостью в фиксированное тело. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы. Эта степень свободы представляет собой расстояние скольжения по линии.
- Цилиндрическое соединение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле. Это комбинация поворотного и скользящего шарниров. Этот сустав имеет две степени свободы. Положение движущегося тела определяется как вращением вокруг, так и скольжением вдоль оси.
- Сферический шарнир или шаровой шарнир требует, чтобы точка в движущемся теле сохраняла контакт с точкой в неподвижном теле. Этот сустав имеет три степени свободы.
- Плоское соединение требует, чтобы плоскость движущегося тела поддерживала контакт с плоскостью неподвижного тела. Этот сустав имеет три степени свободы.
Высшие пары
Вообще говоря, пара более высокого уровня - это ограничение, которое требует, чтобы кривая или поверхность в движущемся теле сохраняла контакт с кривой или поверхностью в неподвижном теле. Например, контакт между кулачком и его ведомым элементом представляет собой более высокую пару, называемую кулачок. Точно так же контакт между эвольвентными кривыми, которые образуют зубья зацепления двух шестерен, представляют собой кулачковые соединения.
Кинематические цепи
Твердые тела («звенья»), соединенные кинематические пары ("суставы") известны как кинематические цепи. Механизмы и роботы являются примерами кинематических цепей. В степень свободы кинематической цепи вычисляется из количества звеньев, а также количества и типа шарниров с использованием формула мобильности. Эту формулу также можно использовать для подсчета топологии кинематических цепей с заданной степенью свободы, известной как синтез типа в конструкции машины.
Примеры
Планарный с одной степенью свободы связи собран из N ссылки и j петли или скользящие соединения:
- N = 2, j = 1: двухзвенная навеска - рычаг;
- N = 4, j = 4: четырехзвенная навеска;
- N = 6, j = 7: а шестиступенчатая навеска. Он должен иметь две связи («тройные связи»), поддерживающие три сустава. Есть две различные топологии, которые зависят от того, как связаны две тройные связи. в Топология ватт, два тройных звена имеют общий стык; в Топология Стивенсона, две тройные связи не имеют общего соединения и связаны двоичными связями.[28]
- N = 8, j = 10: восьмизвенная связь с 16 различными топологиями;
- N = 10, j = 13: связь с десятью стержнями с 230 различными топологиями;
- N = 12, j = 16: связь с двенадцатью стержнями с 6 856 топологиями.
Для более крупных цепей и их топологий связей см. Р. П. Сункари и Л. С. Шмидт, «Структурный синтез плоских кинематических цепей путем адаптации алгоритма типа Маккея», Механизм и теория машин 2006. № 41. С. 1021–1030.
Смотрите также
Рекомендации
- ^ Эдмунд Тейлор Уиттакер (1904). Трактат об аналитической динамике частиц и твердых тел.. Издательство Кембриджского университета. Глава 1. ISBN 0-521-35883-3.
- ^ Джозеф Стайлз Беггс (1983). Кинематика. Тейлор и Фрэнсис. п. 1. ISBN 0-89116-355-7.
- ^ Томас Уоллес Райт (1896 г.). Элементы механики, включая кинематику, кинетику и статику. E и FN Spon. Глава 1.
- ^ Рассел К. Хиббелер (2009). «Кинематика и кинетика частицы». Инженерная механика: динамика (12-е изд.). Прентис Холл. п. 298. ISBN 978-0-13-607791-6.
- ^ Ахмед А. Шабана (2003). «Справочная кинематика». Динамика многотельных систем (2-е изд.). Издательство Кембриджского университета. ISBN 978-0-521-54411-5.
- ^ П. П. Теодореску (2007). «Кинематика». Механические системы, классические модели: механика частиц. Springer. п. 287. ISBN 978-1-4020-5441-9..
- ^ А. Бивенер (2003). Передвижение животных. Издательство Оксфордского университета. ISBN 019850022X.
- ^ Дж. М. Маккарти и Г. С. Со, 2010 г., Геометрический дизайн связей, Спрингер, Нью-Йорк.
- ^ Ампер, Андре-Мари (1834). Essai sur la Philosophie des Sciences. Chez Bachelier.
- ^ Мерц, Джон (1903). История европейской мысли девятнадцатого века. Блэквуд, Лондон. стр.5.
- ^ О. Боттема и Б. Рот (1990). Теоретическая кинематика. Dover Publications. предисловие, стр. 5. ISBN 0-486-66346-9.
- ^ Харпер, Дуглас. "кинотеатр". Интернет-словарь этимологии.
- ^ Ускоренный курс физики
- ^ https://www.youtube.com/watch?v=jLJLXka2wEM Интегралы по физике ускоренного курса
- ^ https://duckduckgo.com/?q=Area+of+a+rectangle&atb=v92-4_g&ia УткаУтка
- ^ https://www.mathsisfun.com/algebra/trig-area-triangle-without-right-angle.html Площадь треугольников без прямых углов
- ^ https://www4.uwsp.edu/physastr/kmenning/Phys203/eqs/kinematics.gif
- ^ Рило, Ф.; Кеннеди, Алекс Б. В. (1876 г.), Кинематика машин: основы теории машин, Лондон: Macmillan
- ^ Геометрия: изучение свойств заданных элементов, которые остаются неизменными при заданных преобразованиях. «Определение геометрии». Он-лайн словарь Merriam-Webster.
- ^ Пол, Ричард (1981). Роботы-манипуляторы: математика, программирование и управление: компьютерное управление роботами-манипуляторами. MIT Press, Кембридж, Массачусетс. ISBN 978-0-262-16082-7.
- ^ Р. Дуглас Грегори (2006). Глава 16. Кембридж, Англия: Кембриджский университет. ISBN 0-521-82678-0.
- ^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы естественной философии. Издательство Кембриджского университета. п.4. ISBN 1-57392-984-0.
- ^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы естественной философии. п. 296.
- ^ М. Фогель (1980). «Задача 17-11». Решение проблем механики. Ассоциация исследований и образования. п. 613. ISBN 0-87891-519-2.
- ^ Церковь Ирвинга Портера (1908 г.). Механика машиностроения. Вайли. п.111. ISBN 1-110-36527-6.
- ^ Моррис Клайн (1990). Математическая мысль от древних до наших дней. Издательство Оксфордского университета. п.472. ISBN 0-19-506136-5.
- ^ Филлипс, Джек (2007). Свобода в машинах, т. 1–2 (переиздание ред.). Издательство Кембриджского университета. ISBN 978-0-521-67331-0.
- ^ Цай, Лунг-Вэнь (2001). Конструкция механизма: перечисление кинематических структур по функциям (иллюстрированный ред.). CRC Press. п. 121. ISBN 978-0-8493-0901-4.
{kind=link}
дальнейшее чтение
- Koetsier, Teun (1994), "§8.3 Кинематика", в Граттан-Гиннесс, Айвор (ред.), Сопутствующая энциклопедия истории и философии математических наук, 2, Рутледж, стр. 994–1001, ISBN 0-415-09239-6
- Луна, Фрэнсис К. (2007). Машины Леонардо да Винчи и Франца Рило, кинематика машин от эпохи Возрождения до 20 века. Springer. ISBN 978-1-4020-5598-0.
- Эдуард Этюд (1913) Переводчик Д. Х. Дельфениха, «Основы и задачи аналитической кинематики».
внешняя ссылка
- Java-апплет одномерной кинематики
- Physclips: Механика с анимацией и видеоклипами из Университета Нового Южного Уэльса.
- Кинематические модели для цифровой библиотеки дизайна (KMODDL), где представлены фильмы и фотографии сотен работающих моделей механических систем на Корнелл Университет и библиотека электронных книг классических текстов по машиностроению и машиностроению.
- Микродюймовое позиционирование с использованием кинематических компонентов