Евклидов вектор - Euclidean vector

В математика, физика и инженерное дело, а Евклидов вектор (иногда называемый геометрический[1] или же пространственный вектор,[2] или - как здесь - просто вектор) - геометрический объект, имеющий величина (или же длина ) и направление. Векторы могут быть добавлены к другим векторам согласно векторная алгебра. Евклидов вектор часто представляется в виде луча ( отрезок с определенным направлением), или графически в виде стрелки, соединяющей начальная точка А с конечная точка B,[3] и обозначается .[4]

Вектор - это то, что нужно, чтобы «нести» точку А к точке B; латинское слово вектор означает «перевозчик».[5] Впервые он был использован астрономами 18-го века, исследовавшими вращение планет вокруг Солнца.[6] Величина вектора - это расстояние между двумя точками, а направление относится к направлению смещения от А к B. Много алгебраические операции на действительные числа Такие как добавление, вычитание, умножение, и отрицание имеют близкие аналоги векторов,[7] операции, которые подчиняются знакомым алгебраическим законам коммутативность, ассоциативность, и распределенность. Эти операции и связанные с ними законы соответствуют требованиям Евклидово векторов как пример более общей концепции векторов, определяемых просто как элементы векторное пространство.
Векторы играют важную роль в физика: the скорость и ускорение движущегося объекта и силы действие на него можно описать векторами.[8] Многие другие физические величины можно рассматривать как векторы. Хотя большинство из них не представляют собой расстояния (кроме, например, позиция или же смещение ), их величина и направление все еще могут быть представлены длиной и направлением стрелки. Математическое представление физического вектора зависит от система координат использовал, чтобы описать это. К другим векторным объектам, которые описывают физические величины и аналогичным образом трансформируются при изменении системы координат, относятся: псевдовекторы и тензоры.[9]
История
Концепция вектора, как мы ее знаем сегодня, развивалась постепенно в течение более 200 лет. Существенный вклад в ее развитие внесли около десятка человек.[10]
В 1835 г. Джусто Беллавитис абстрагировался от основной идеи, когда он установил концепцию равноправие. Работая на евклидовой плоскости, он сделал равноправными любую пару отрезков прямой одинаковой длины и ориентации. По сути, он понял отношение эквивалентности на пары точек (бипоинт) на плоскости, и таким образом возводится первое пространство векторов на плоскости.[10]:52–4
Период, термин вектор был представлен Уильям Роуэн Гамильтон как часть кватернион, который представляет собой сумму q = s + v из Настоящий номер s (также называемый скаляр) и трехмерной вектор. Как и Беллавитис, Гамильтон рассматривал векторы как представителя классы равновеликих направленных сегментов. В качестве сложные числа использовать мнимая единица дополнить реальная линия, Гамильтон рассматривал вектор v быть мнимая часть кватерниона:
- Алгебраически мнимая часть, геометрически построенная из прямой линии или радиус-вектора, которая, как правило, для каждого определенного кватерниона имеет определенную длину и определенное направление в пространстве, может называться векторной частью или просто вектором кватернион.[11]
Несколько других математиков разработали векторные системы в середине девятнадцатого века, в том числе Огюстен Коши, Герман Грассманн, Август Мебиус, Граф де Сен-Венан, и Мэтью О'Брайен. Работа Грассмана 1840 года Theorie der Ebbe und Flut (Теория приливов и отливов) была первой системой пространственного анализа, которая похожа на сегодняшнюю систему и содержала идеи, соответствующие перекрестному произведению, скалярному произведению и векторному дифференцированию. Работы Грассмана в значительной степени игнорировались до 1870-х годов.[10]
Питер Гатри Тейт носил кватернионный стандарт после Гамильтона. Его 1867 г. Элементарный трактат кватернионов включал обширное лечение наблы или оператор дель ∇.
В 1878 г. Элементы динамического был опубликован Уильям Кингдон Клиффорд. Клиффорд упростил исследование кватернионов, выделив скалярное произведение и перекрестное произведение двух векторов из полного кватернионного произведения. Этот подход сделал векторные вычисления доступными для инженеров - и других специалистов, работающих в трех измерениях и скептически относящихся к четвертому.
Джозайя Уиллард Гиббс, который подвергался воздействию кватернионов через Джеймс Клерк Максвелл с Трактат об электричестве и магнетизме, отделили их векторную часть для самостоятельной обработки. Первая половина Гиббса Элементы векторного анализа, опубликованная в 1881 году, представляет собой, по сути, современную систему векторного анализа.[10][7] В 1901 г. Эдвин Бидвелл Уилсон опубликовано Векторный анализ, адаптированный из лекций Гибба, который исключил любое упоминание кватернионов при разработке векторного исчисления.
Обзор
В физика и инженерное дело, вектор обычно рассматривается как геометрический объект, характеризуемый величина и направление. Формально определяется как направленная отрезок, или стрелка, в Евклидово пространство.[12] В чистая математика, вектор определяется в более общем смысле как любой элемент векторное пространство. В этом контексте векторы являются абстрактными объектами, которые могут характеризоваться или не характеризоваться величиной и направлением. Это обобщенное определение подразумевает, что вышеупомянутые геометрические объекты представляют собой особый вид векторов, поскольку они являются элементами особого типа векторного пространства, называемого Евклидово пространство.
Эта статья о векторах, строго определенных как стрелки в евклидовом пространстве. Когда возникает необходимость отличить эти специальные векторы от векторов, как это определено в чистой математике, их иногда называют геометрический, пространственный, или же Евклидово векторов.
Евклидов вектор, являясь стрелкой, обладает определенным начальная точка и конечная точка. Вектор с фиксированной начальной и конечной точкой называется связанный вектор.[13] Когда только величина и направление вектора имеют значение, тогда конкретная начальная точка не имеет значения, и вектор называется бесплатный вектор. Таким образом, две стрелки и в пространстве представляют один и тот же свободный вектор, если они имеют одинаковую величину и направление: то есть они равномерный если четырехугольник ABB′A ′ это параллелограмм. Если евклидово пространство оснащено возможностью выбора источник, то свободный вектор эквивалентен связанному вектору той же величины и направления, начальная точка которого является началом координат.

Период, термин вектор также имеет обобщение на более высокие измерения и на более формальные подходы с гораздо более широкими приложениями.
Примеры в одном измерении
Поскольку концепция физиков сила имеет направление и величину, его можно рассматривать как вектор. В качестве примера рассмотрим силу, направленную вправо F из 15 ньютоны. Если положительный ось также направлен вправо, то F представлен вектором 15 N, и если положительные точки слева, то вектор для F равно -15 Н. В любом случае величина вектора равна 15 Н. Аналогично, векторное представление смещения Δs из 4 метры будет 4 м или -4 м, в зависимости от его направления, и его величина будет 4 м независимо.
По физике и технике
Векторы имеют фундаментальное значение в физических науках. Их можно использовать для представления любой величины, имеющей величину, направление и соблюдающую правила сложения векторов. Примером является скорость, величина которого скорость. Например, скорость 5 метров в секунду вверх может быть представлен вектором (0, 5) (в 2-х измерениях с положительным у-ось как «вверх»). Другая величина, представленная вектором, - это сила, поскольку он имеет величину и направление и следует правилам сложения векторов.[8] Векторы также описывают многие другие физические величины, такие как линейное смещение, смещение, линейное ускорение, угловое ускорение, линейный импульс, и угловой момент. Другие физические векторы, такие как электрический и магнитное поле, представлены как система векторов в каждой точке физического пространства; это векторное поле. Примерами величин, которые имеют величину и направление, но не соответствуют правилам сложения векторов, являются угловое смещение и электрический ток. Следовательно, это не векторы.
В декартовом пространстве
в Декартова система координат, связанный вектор может быть представлен путем определения координат его начальной и конечной точки. Например, точки А = (1, 0, 0) и B = (0, 1, 0) в пространстве определить связанный вектор указывая с точки Икс = 1 на Икс- ось в точку у = 1 на у-ось.
В декартовых координатах свободный вектор можно представить в терминах соответствующего связанного вектора, в этом смысле, начальная точка которого имеет координаты начала координат. О = (0, 0, 0). Затем он определяется координатами конечной точки этого связанного вектора. Таким образом, свободный вектор, представленный (1, 0, 0), является вектором единичной длины, указывающим вдоль направления положительного Икс-ось.
Это координатное представление свободных векторов позволяет выразить их алгебраические свойства удобным числовым способом. Например, сумма двух (свободных) векторов (1, 2, 3) и (−2, 0, 4) является (свободным) вектором
- (1, 2, 3) + (−2, 0, 4) = (1 − 2, 2 + 0, 3 + 4) = (−1, 2, 7).
Евклидовы и аффинные векторы
В геометрических и физических условиях иногда можно естественным образом связать длина или величина и направление к векторам. Кроме того, понятие направления строго связано с понятием угол между двумя векторами. Если скалярное произведение двух векторов - скалярнозначное произведение двух векторов - тогда также можно определить длину; скалярное произведение дает удобную алгебраическую характеристику как угла (функция скалярного произведения между любыми двумя ненулевыми векторами), так и длины (квадратный корень из скалярного произведения самого вектора). В трех измерениях можно дополнительно определить перекрестное произведение, который дает алгебраическую характеристику площадь и ориентация в пространстве параллелограмм определяется двумя векторами (используемыми как стороны параллелограмма). В любом измерении (и, в частности, в более высоких измерениях) можно определить внешний продукт, который (среди прочего) дает алгебраическую характеристику площади и ориентации в пространстве п-размерный параллелоэдр определяется п векторов.
Однако не всегда возможно или желательно определять длину вектора естественным образом. Этот более общий тип пространственного вектора является предметом векторные пространства (для свободных векторов) и аффинные пространства (для связанных векторов, каждый из которых представлен упорядоченной парой «точек»). Важным примером является Пространство Минковского (что важно для нашего понимания специальная теория относительности ), где существует обобщение длины, которое позволяет ненулевым векторам иметь нулевую длину. Другие физические примеры взяты из термодинамика, где многие из интересующих величин можно рассматривать как векторы в пространстве без понятия длины или угла.[14]
Обобщения
В физике, а также в математике вектор часто отождествляется с кортеж компонентов или список чисел, которые действуют как скалярные коэффициенты для набора базисные векторы. Когда базис преобразуется, например, вращением или растяжением, тогда компоненты любого вектора в терминах этого базиса также преобразуются в противоположном смысле. Сам вектор не изменился, но основание изменилось, поэтому компоненты вектора должны измениться для компенсации. Вектор называется ковариантный или же контравариантный, в зависимости от того, как преобразование компонентов вектора связано с преобразованием базиса. В общем, контравариантные векторы - это «правильные векторы» с единицами измерения расстояния (такими как смещение) или расстояния, умноженного на некоторые другие единицы (такие как скорость или ускорение); ковариантные векторы, с другой стороны, имеют единицы измерения расстояния, такие как градиент. Если вы меняете единицы измерения (частный случай изменения основы) с метров на миллиметры, масштабный коэффициент 1/1000, смещение 1 м становится 1000 мм - контравариантное изменение числового значения. Напротив, градиент 1K / м становится 0,001 К / мм - ковариантное изменение значения (подробнее см. ковариация и контравариантность векторов ). Тензоры являются другим типом величин, которые ведут себя подобным образом; вектор - это один из видов тензор.
В чистом виде математика, вектор - это любой элемент векторное пространство над некоторыми поле и часто изображается как вектор координат. Векторы, описанные в этой статье, являются очень частным случаем этого общего определения, потому что они контравариантны по отношению к окружающему пространству. Контравариантность отражает физическую интуицию, стоящую за идеей о том, что вектор имеет «величину и направление».
Представления

Векторы обычно обозначают строчная буква жирный шрифт, как в , и ,[4] или строчным курсивом полужирным шрифтом, как в а. (Верхний регистр буквы обычно используются для обозначения матрицы.) Другие соглашения включают или же а, особенно почерк. В качестве альтернативы некоторые используют тильда (~) или волнистая линия подчеркивания, проведенная под символом, например , которое является условным обозначением жирного шрифта. Если вектор представляет собой направленный расстояние или же смещение с точки А в точку B (см. рисунок), его также можно обозначить как или же AB. В Немецкий в литературе особенно распространено представление векторов с малым фрактур буквы, такие как .







Векторы обычно показаны на графиках или других диаграммах в виде стрелок (направленных отрезки линии ), как показано на рисунке. Здесь суть А называется источник, хвост, основание, или же начальная точка, а точка B называется голова, кончик, конечная точка, конечная точка или же конечная точка. Длина стрелки пропорциональна вектору величина, а направление, в котором указывает стрелка, указывает направление вектора.

На двумерной диаграмме вектор перпендикуляр к самолет диаграммы иногда желательно. Эти векторы обычно отображаются в виде маленьких кружков. Круг с точкой в центре (Unicode U + 2299 ⊙) указывает вектор, указывающий из передней части диаграммы к зрителю. Круг с вписанным в него крестом (Unicode U + 2297 ⊗) указывает вектор, указывающий на диаграмму и позади нее. Это можно рассматривать как просмотр кончика стрелка идите вперед и наблюдайте за полетами стрелы со спины.

Для вычисления с использованием векторов графическое представление может быть слишком громоздким. Векторы в п-мерное евклидово пространство можно представить в виде векторы координат в Декартова система координат. Конечная точка вектора может быть идентифицирована с помощью упорядоченного списка п действительные числа (п-кортеж ). Эти числа являются координаты конца вектора относительно заданного Декартова система координат, и обычно называются скалярные компоненты (или же скалярные проекции) вектора по осям системы координат.
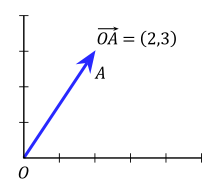
В качестве примера в двух измерениях (см. Рисунок) вектор из начала координат О = (0, 0) в точку А = (2, 3) просто записывается как

Представление о том, что хвост вектора совпадает с началом координат, неявно и легко понимается. Таким образом, более явное обозначение обычно считается ненужным (и действительно редко используется).

В трехмерный Евклидово пространство (или р3) векторы отождествляются с тройками скалярных компонент:
- также написано


Это можно обобщить на n-мерный Евклидово пространство (или рп).

Эти числа часто объединяются в вектор столбца или же вектор строки, особенно при работе с матрицы, следующее:
![{displaystyle mathbf {a} = {egin {bmatrix} a_ {1} a_ {2} a_ {3} end {bmatrix}} = [a_ {1} a_ {2} a_ {3}] ^ {имя оператора {T}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a4d592431150c7ec8a51217d87dae2ed1224df2)
Другой способ представить вектор в п-размеры - ввести стандартная основа векторов. Например, в трех измерениях их три:

Они имеют интуитивную интерпретацию как векторы единичной длины, указывающие вверх Икс-, у-, и z- ось Декартова система координат, соответственно. В этом смысле любой вектор а в р3 можно выразить в виде:

или же

куда а1, а2, а3 называются компоненты вектора (или же векторные проекции) из а на базисных векторах или, что то же самое, на соответствующих декартовых осях Икс, у, и z (см. рисунок), а а1, а2, а3 соответствующие скалярные компоненты (или скалярные проекции).
Во вводных учебниках физики стандартные базисные векторы часто обозначают вместо этого (или , в которой символ шляпы ^ обычно обозначает единичные векторы ). В этом случае скалярная и векторная компоненты обозначаются соответственно аИкс, ау, аz, и аИкс, ау, аz (обратите внимание на разницу жирным шрифтом). Таким образом,



Обозначение ея совместим с индексное обозначение и соглашение о суммировании обычно используется в математике, физике и инженерии высшего уровня.
Разложение или разрешение
Как объяснено над, вектор часто описывается набором компонентов вектора, которые складывать чтобы сформировать данный вектор. Обычно эти компоненты являются прогнозы вектора на множестве взаимно перпендикулярных опорных осей (базисных векторов). Вектор называется разложенный или же решено в отношении тот набор.
Разложение или разрешение[15] разбиение вектора на компоненты не является уникальным, так как зависит от выбора осей, на которые проецируется вектор.
Более того, использование декартовых единичных векторов, таких как как основа в котором представлять вектор не требуется. Векторы также могут быть выражены в терминах произвольного базиса, включая единичные векторы цилиндрическая система координат () или же сферическая система координат (). Последние два варианта более удобны для решения задач, обладающих цилиндрической или сферической симметрией соответственно.


Выбор базиса не влияет на свойства вектора или его поведение при преобразованиях.
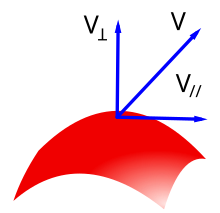
Вектор также может быть разбит на «нефиксированные» базисные векторы, которые меняют свои ориентация как функция времени или пространства. Например, вектор в трехмерном пространстве можно разложить относительно двух осей соответственно нормальный, и касательная на поверхность (см. рисунок). Более того, радиальный и тангенциальные компоненты вектора относятся к радиус из вращение объекта. Первый параллельно к радиусу, а последний ортогональный к нему.[16]
В этих случаях каждый из компонентов может быть, в свою очередь, разложен относительно фиксированной системы координат или базисного набора (например, Глобальный система координат, или инерциальная система отсчета ).
Основные свойства
В следующем разделе используется Декартова система координат с базисными векторами

и предполагает, что все векторы имеют начало в качестве общей базовой точки. Вектор а будет записано как

Равенство
Два вектора считаются равными, если они имеют одинаковую величину и направление. Равнозначно они будут равны, если их координаты равны. Итак, два вектора

и

равны, если

Противоположные, параллельные и антипараллельные векторы
Два вектора противоположны, если они имеют одинаковую величину, но противоположное направление. Итак, два вектора
и
противоположны, если

Два вектора параллельны, если они имеют одинаковое направление, но не обязательно одинаковой величины, или антипараллельны, если они имеют противоположное направление, но не обязательно одинаковой величины.
Сложение и вычитание
Предположим теперь, что а и б не обязательно равные векторы, но они могут иметь разные величины и направления. Сумма а и б является

Дополнение можно представить графически, поместив конец стрелки б во главе стрелки а, а затем рисуя стрелку из хвоста а к главе б. Новая нарисованная стрелка представляет вектор а + б, как показано ниже:[8]

Этот метод сложения иногда называют правило параллелограмма потому что а и б сформировать стороны параллелограмм и а + б одна из диагоналей. Если а и б являются связанными векторами, имеющими одну и ту же базовую точку, эта точка также будет базовой точкой а + б. Геометрически можно проверить, что а + б = б + а и (а + б) + c = а + (б + c).
Разница а и б является

Вычитание двух векторов можно геометрически проиллюстрировать следующим образом: вычесть б из а, поместите хвосты а и б в той же точке, а затем нарисуйте стрелку из головы б к главе а. Эта новая стрелка представляет вектор (-b) + а, с (-b) быть противоположностью бсм. рисунок. И (-b) + а = а − б.

Скалярное умножение

Вектор также может быть умножен или пере-масштабированный, автор настоящий номер р. В контексте обычная векторная алгебра эти действительные числа часто называют скаляры (из шкала), чтобы отличить их от векторов. Операция умножения вектора на скаляр называется скалярное умножение. Результирующий вектор

Интуитивно, умножая на скаляр р растягивает вектор с коэффициентом р. Геометрически это можно визуализировать (по крайней мере, в том случае, когда р является целым числом) как размещение р копии вектора в строке, где конечная точка одного вектора является начальной точкой следующего вектора.
Если р отрицательна, то вектор меняет направление: он переворачивается на угол 180 °. Два примера (р = −1 и р = 2) приведены ниже:

Скалярное умножение распределительный над сложением векторов в следующем смысле: р(а + б) = ра + рб для всех векторов а и б и все скаляры р. Можно также показать, что а − б = а + (−1)б.
Длина
В длина или же величина или же норма вектора а обозначается ‖а‖ Или, реже, |а|, что не следует путать с абсолютная величина (скалярная «норма»).
Длина вектора а можно вычислить с помощью Евклидова норма

что является следствием теорема Пифагора так как базисные векторы е1, е2, е3 ортогональные единичные векторы.
Это оказывается равным квадратному корню из скалярное произведение, обсуждаемый ниже, вектора с самим собой:

- Единичный вектор

А единичный вектор - любой вектор длины единицы; обычно единичные векторы используются просто для указания направления. Вектор произвольной длины можно разделить на его длину, чтобы получить единичный вектор.[17] Это известно как нормализация вектор. Единичный вектор часто обозначается шляпой, как в â.
Чтобы нормализовать вектор а = (а1, а2, а3)масштабируем вектор на величину, обратную его длине ‖а‖. То есть:

- Нулевой вектор
В нулевой вектор - вектор нулевой длины. Записанный в координатах вектор имеет вид (0, 0, 0), и его обычно обозначают , 0, или просто 0.[4] В отличие от любого другого вектора, он имеет произвольное или неопределенное направление и не может быть нормализован (то есть не существует единичного вектора, кратного нулевому вектору). Сумма нулевого вектора с любым вектором а является а (то есть, 0 + а = а).

Скалярное произведение
В скалярное произведение двух векторов а и б (иногда называют внутренний продукт, или, поскольку его результат является скаляром, скалярное произведение) обозначается а ∙ б,[4] и определяется как:

куда θ это мера угол между а и б (видеть тригонометрическая функция для объяснения косинуса). Геометрически это означает, что а и б нарисованы с общей начальной точкой, а затем длина а умножается на длину компонента б что указывает в том же направлении, что и а.
Скалярное произведение также можно определить как сумму произведений компонентов каждого вектора как

Перекрестный продукт
В перекрестное произведение (также называемый векторный продукт или же внешний продукт) имеет значение только в трех или Семь размеры. Перекрестное произведение отличается от скалярного произведения в первую очередь тем, что результатом перекрестного произведения двух векторов является вектор. Перекрестное произведение, обозначенное а × б, - вектор, перпендикулярный обоим а и б и определяется как

куда θ это мера угла между а и б, и п является единичным вектором перпендикуляр как для а и б что завершает правша система. Ограничение праворукости необходимо, потому что существуют два единичные векторы, перпендикулярные обоим а и б, а именно п и (-п).

Перекрестное произведение а × б определяется так, что а, б, и а × б также становится правосторонней системой (хотя а и б не обязательно ортогональный ). Это правило правой руки.
Длина а × б можно интерпретировать как площадь параллелограмма, имеющего а и б как стороны.
Перекрестное произведение можно записать как

Для произвольного выбора пространственной ориентации (то есть с учетом левосторонних и правосторонних систем координат) векторное произведение двух векторов равно псевдовектор вместо вектора (см. ниже).
Скалярное тройное произведение
В скалярное тройное произведение (также называемый коробочный продукт или же смешанное тройное произведение) - это не совсем новый оператор, а способ применения двух других операторов умножения к трем векторам. Скалярное тройное произведение иногда обозначается через (а б c) и определяется как:

Он имеет три основных назначения. Во-первых, абсолютное значение коробочного продукта - это объем параллелепипед у которого есть ребра, определяемые тремя векторами. Во-вторых, скалярное тройное произведение равно нулю тогда и только тогда, когда три вектора равны линейно зависимый, что можно легко доказать, если учесть, что для того, чтобы три вектора не образовывали объем, все они должны лежать в одной плоскости. В-третьих, коробочное произведение положительно тогда и только тогда, когда три вектора а, б и c правши.
В компонентах (относительно правого ортонормированного базиса), если три вектора рассматриваются как строки (или столбцы, но в том же порядке), скалярное тройное произведение - это просто детерминант 3х3 матрица имея три вектора как строки

Скалярное тройное произведение линейно по всем трем элементам и антисимметрично в следующем смысле:

Преобразование между несколькими декартовыми основаниями
Все примеры до сих пор имели дело с векторами, выраженными в терминах одного и того же базиса, а именно, е base {е1, е2, е3}. Однако вектор может быть выражен с помощью любого количества различных оснований, которые не обязательно выровнены друг с другом, но при этом остаются одним и тем же вектором. в е базис, вектор а выражается по определению как
- .

Скалярные компоненты в е основы, по определению,
- ,
- ,
- .



В другом ортонормированном базисе п = {п1, п2, п3}, который не обязательно совпадает с е, вектор а выражается как

и скалярные компоненты в п основы, по определению,
- ,
- ,
- .



Ценности п, q, р, и ты, v, ш относятся к единичным векторам таким образом, чтобы результирующая векторная сумма была точно таким же физическим вектором а в обоих случаях. Часто встречаются векторы, известные в терминах различных оснований (например, одно основание прикреплено к Земле, а второе - к движущемуся транспортному средству). В таком случае необходимо разработать метод преобразования между основаниями, чтобы можно было выполнять основные векторные операции, такие как сложение и вычитание. Один способ выразить ты, v, ш с точки зрения п, q, р использовать матрицы столбцов вместе с матрица направляющих косинусов содержащую информацию, которая связывает две базы. Такое выражение может быть сформировано путем подстановки приведенных выше уравнений в форму
- ,
- ,
- .



Распределение умножения точек дает
- ,
- ,
- .



Замена каждого скалярного произведения на уникальный скаляр дает
- ,
- ,
- ,



и эти уравнения могут быть выражены в виде единого матричного уравнения
- .

Это матричное уравнение связывает скалярные компоненты а в п основа (ты,v, и ш) с теми, кто в е основа (п, q, и р). Каждый элемент матрицы cjk это направляющий косинус относящийся пj к еk.[18] Период, термин направляющий косинус относится к косинус угла между двумя единичными векторами, который также равен их скалярное произведение.[18] Следовательно,









Ссылаясь вместе на е1, е2, е3 как е основы и п1, п2, п3 как п матрица, содержащая все cjk известен как "матрица преобразования из е к п", или "матрица вращения из е к п"(потому что это можно представить как" поворот "вектора от одного базиса к другому), или"матрица направляющих косинусов из е к п"[18] (потому что он содержит направляющие косинусы). Свойства матрица вращения таковы, что его обратный равен своему транспонировать. Это означает, что «матрица вращения из е к п"является транспонированием" матрицы вращения из п к е".
Матрица направляющего косинуса C имеет следующие свойства:[19]
- определитель равен единице, | C | = 1
- обратное равно транспонированию,
- строки и столбцы являются ортогональными единичными векторами, поэтому их скалярные произведения равны нулю.
Преимущество этого метода заключается в том, что матрицу направляющих косинусов обычно можно получить независимо, используя Углы Эйлера или кватернион чтобы связать две векторные базы, так что преобразования базиса могут выполняться напрямую, без необходимости вычислять все скалярные произведения, описанные выше.
Последовательно применяя несколько матричных умножений, любой вектор может быть выражен в любом базисе, если известен набор направляющих косинусов, связывающих последовательные базисы.[18]
Другие размеры
За исключением перекрестного и тройного произведений, приведенные выше формулы обобщаются для двух измерений и более высоких измерений. Например, сложение обобщается на два измерения как

и в четырех измерениях как

Перекрестное произведение нелегко обобщить на другие измерения, хотя тесно связанные внешний продукт делает, результат которого бивектор. В двух измерениях это просто псевдоскалярный

А семимерное кросс-произведение похож на векторное произведение в том, что его результат - вектор, ортогональный двум аргументам; однако естественного способа выбрать один из возможных таких продуктов не существует.
Физика
Векторы имеют множество применений в физике и других науках.
Длина и единицы
В абстрактных векторных пространствах длина стрелки зависит от безразмерный шкала. Если он представляет собой, например, силу, «масштаб» имеет физическое измерение длина / сила. Таким образом, обычно существует согласованность в масштабе между количествами одного и того же размера, но в остальном масштабные соотношения могут варьироваться; например, если «1 ньютон» и «5 м» обозначены стрелкой 2 см, масштаб будет 1 м: 50 Н и 1: 250 соответственно. Равная длина векторов разной размерности не имеет особого значения, если не существует константа пропорциональности присущие системе, которую представляет диаграмма. Также длина единичного вектора (размерная длина, а не длина / сила и т. Д.) Не имеет значения, инвариантного для системы координат.
Векторозначные функции
Часто в областях физики и математики вектор эволюционирует во времени, что означает, что он зависит от параметра времени. т. Например, если р представляет вектор положения частицы, тогда р(т) дает параметрический представление траектории частицы. Векторнозначные функции могут быть дифференцированный и интегрированный путем дифференцирования или интегрирования компонентов вектора, а также многих знакомых правил из исчисление остаются в силе для производной и интеграла векторных функций.
Положение, скорость и ускорение
Положение точки Икс = (Икс1, Икс2, Икс3) в трехмерном пространстве можно представить как вектор положения чья базовая точка - начало координат

Вектор положения имеет размеры длина.
Учитывая два очка Икс = (Икс1, Икс2, Икс3), у = (у1, у2, у3) их смещение это вектор

который определяет положение у относительно Икс. Длина этого вектора дает расстояние по прямой от Икс к у. Смещение имеет размеры длины.
В скорость v точки или частицы является вектором, его длина дает скорость. Для постоянной скорости положение во времени т будет

куда Икс0 позиция во время т = 0. Скорость - это производная по времени позиции. Его размеры - длина / время.
Ускорение а точки - это вектор, который является производная по времени скорости. Его размеры - длина / время.2.
Сила, энергия, работа
Сила вектор с размерами масса × длина / время2 и Второй закон Ньютона это скалярное умножение

Работа - это точечный продукт сила и смещение

Векторы, псевдовекторы и преобразования
Альтернативная характеристика евклидовых векторов, особенно в физике, описывает их как списки величин, которые ведут себя определенным образом при определенных условиях. преобразование координат. А контравариантный вектор требуется наличие компонентов, которые «трансформируются противоположно основанию» при изменении основа. Сам вектор не меняется при преобразовании базиса; вместо этого компоненты вектора вносят изменение, которое отменяет изменение основы. Другими словами, если опорные оси (и основание, полученное из них) были повернуты в одном направлении, компонентное представление вектора будет вращаться в противоположном направлении, чтобы сгенерировать тот же конечный вектор. Точно так же, если опорные оси были растянуты в одном направлении, компоненты вектора уменьшились бы точно компенсирующим образом. Математически, если базис претерпевает преобразование, описываемое обратимая матрица M, так что координатный вектор Икс преобразован в Икс′ = MИкс, то контравариантный вектор v должен быть аналогичным образом преобразован через v′ = Mv. Это важное требование - то, что отличает контравариантный вектор от любой другой тройки физически значимых величин. Например, если v состоит из Икс, у, и z-компоненты скорость, тогда v - контравариантный вектор: если координаты пространства растягиваются, вращаются или скручиваются, то компоненты скорости преобразуются таким же образом. С другой стороны, например, тройка, состоящая из длины, ширины и высоты прямоугольного блока, может составлять три компонента абстрактного вектор, но этот вектор не был бы контравариантным, поскольку поворот блока не изменяет его длину, ширину и высоту. Примеры контравариантных векторов включают смещение, скорость, электрическое поле, импульс, сила, и ускорение.

На языке дифференциальная геометрия, требование, чтобы компоненты векторного преобразования по одной и той же матрице координатного перехода равносильно определению контравариантный вектор быть тензор из контравариантный ранг один. В качестве альтернативы, контравариантный вектор определяется как касательный вектор, а правила преобразования контравариантного вектора следуют из Правило цепи.
Некоторые векторы трансформируются подобно контравариантным векторам, за исключением того, что при отражении через зеркало они переворачиваются. и получить знак минус. Говорят, что преобразование, которое переключает праворукость на левшу и наоборот, как это делает зеркало, изменяет ориентация пространства. Вектор, который приобретает знак минус при изменении ориентации пространства, называется псевдовектор или осевой вектор. Обычные векторы иногда называют истинные векторы или же полярные векторы отличить их от псевдовекторов. Псевдовекторы чаще всего встречаются как перекрестное произведение двух обычных векторов.
Одним из примеров псевдовектора является угловая скорость. Вождение в машина, и с нетерпением жду, каждый из колеса имеет вектор угловой скорости, указывающий влево. Если мир отражается в зеркале, которое переключает левую и правую стороны автомобиля, отражение вектора угловой скорости указывает вправо, но действительный вектор угловой скорости колеса по-прежнему указывает влево, что соответствует знаку минус. Другие примеры псевдовекторов включают: магнитное поле, крутящий момент или, в более общем случае, любое векторное произведение двух (истинных) векторов.
Это различие между векторами и псевдовекторами часто игнорируется, но оно становится важным при изучении симметрия характеристики. Видеть паритет (физика).
Смотрите также
- Аффинное пространство, который различает векторы и точки
- Структура данных массива или же Вектор (информатика)
- Банахово пространство
- Алгебра Клиффорда
- Комплексное число
- Система координат
- Ковариация и контравариантность векторов
- Четыре вектора, неевклидов вектор в пространстве Минковского (т.е. четырехмерное пространство-время), важный в относительность
- Функциональное пространство
- Грассманн с Ausdehnungslehre
- Гильбертово пространство
- Нормальный вектор
- Нулевой вектор
- Псевдовектор
- Кватернион
- Тангенциальные и нормальные компоненты (вектора)
- Тензор
- Единичный вектор
- Векторный набор
- Векторное исчисление
- Векторное обозначение
- Вектор-функция
Примечания
- ^ Иванов 2001
- ^ Хайнбокель 2001
- ^ Ито 1993, п. 1678; Педое 1988
- ^ а б c d «Сборник математических символов». Математическое хранилище. 2020-03-01. Получено 2020-08-19.
- ^ Латинский: vectus, совершенное причастие of vehere, "нести" / Veho = "Я ношу". За историческое развитие слова вектор, видеть "вектор п.". Оксфордский словарь английского языка (Интернет-ред.). Издательство Оксфордского университета. (Подписка или членство участвующего учреждения требуется.) и Джефф Миллер. «Самые ранние известные применения некоторых слов математики». Получено 2007-05-25.
- ^ Оксфордский словарь английского языка (2-е изд.). Лондон: Claredon Press. 2001 г. ISBN 9780195219425.
- ^ а б "вектор | Определение и факты". Энциклопедия Британника. Получено 2020-08-19.
- ^ а б c "Векторы". www.mathsisfun.com. Получено 2020-08-19.
- ^ Вайсштейн, Эрик В. "Вектор". mathworld.wolfram.com. Получено 2020-08-19.
- ^ а б c d Майкл Дж. Кроу, История векторного анализа; см. также его "конспект лекций" (PDF). Архивировано из оригинал (PDF) 26 января 2004 г.. Получено 2010-09-04. на предмет.
- ^ У. Р. Гамильтон (1846) Лондонский, Эдинбургский и Дублинский философский журнал 3-я серия 29 27
- ^ Ито 1993, п. 1678
- ^ Ранее известный как расположенный вектор. Видеть Lang 1986, п. 9.
- ^ Термодинамика и дифференциальные формы
- ^ Гиббс, Дж. (1901). Векторный анализ: Учебное пособие для студентов-математиков и физиков, основанное на лекциях Дж. Уилларда Гиббса, До свидания б. Wilson, Chares Scribner's Sons, New York, p. 15: "Любой вектор р копланарен с двумя неколлинеарными векторами а и б может быть разделен на две составляющие, параллельные а и б соответственно. Это разрешение может быть достигнуто путем построения параллелограмма ... "
- ^ Физический факультет У. Гвельфа, "Крутящий момент и угловое ускорение"
- ^ «1.1: Векторы». Математика LibreTexts. 2013-11-07. Получено 2020-08-19.
- ^ а б c d Кейн и Левинсон 1996, стр. 20–22
- ^ М., Роджерс, Роберт (2007). Прикладная математика в интегрированных навигационных системах (3-е изд.). Рестон, Вирджиния: Американский институт аэронавтики и астронавтики. ISBN 9781563479274. OCLC 652389481.
Рекомендации
Математические методы лечения
- Апостол, Том (1967). Исчисление. Vol. 1: Исчисление с одной переменной с введением в линейную алгебру. Вайли. ISBN 978-0-471-00005-1.CS1 maint: ref = harv (связь)
- Апостол, Том (1969). Исчисление. Vol. 2: Исчисление с несколькими переменными и линейная алгебра с приложениями. Вайли. ISBN 978-0-471-00007-5.CS1 maint: ref = harv (связь)
- Хайнбокель, Дж. Х. (2001), Введение в тензорное исчисление и механику сплошной среды, Издательство Trafford Publishing, ISBN 1-55369-133-4.
- Ито, Киёси (1993), Энциклопедический математический словарь (2-е изд.), MIT Press, ISBN 978-0-262-59020-4.
- Иванов, А. (2001) [1994], "Вектор", Энциклопедия математики, EMS Press.
- Кейн, Томас Р .; Левинсон, Дэвид А. (1996), Dynamics Online, Саннивейл, Калифорния: OnLine Dynamics.
- Ланг, Серж (1986). Введение в линейную алгебру (2-е изд.). Springer. ISBN 0-387-96205-0.CS1 maint: ref = harv (связь)
- Педое, Даниэль (1988). Геометрия: комплексный курс. Дувр. ISBN 0-486-65812-0.CS1 maint: ref = harv (связь)
Физические процедуры
- Арис, Р. (1990). Векторы, тензоры и основные уравнения механики жидкости. Дувр. ISBN 978-0-486-66110-0.CS1 maint: ref = harv (связь)
- Фейнман, Ричард; Leighton, R .; Пески, М. (2005). «Глава 11». Лекции Фейнмана по физике. Vol. I (2-е изд.). Эддисон Уэсли. ISBN 978-0-8053-9046-9.CS1 maint: ref = harv (связь)
внешняя ссылка
- "Вектор", Энциклопедия математики, EMS Press, 2001 [1994]
- Онлайн-векторные идентичности (PDF )
- Представляем векторы Концептуальное введение (Прикладная математика )
