Радар непрерывного действия - Continuous-wave radar
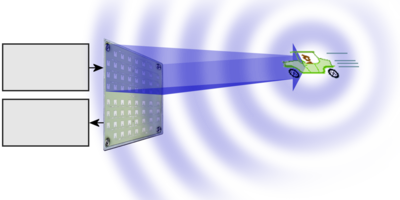
Радар непрерывного действия (CW радар) - это тип радар система с известной стабильной частотой непрерывная волна радио энергия передается, а затем принимается от любых отражающих объектов.[1] Отдельные объекты можно обнаружить с помощью Эффект Допплера, что приводит к тому, что принимаемый сигнал имеет частоту, отличную от частоты передачи, что позволяет его обнаруживать путем фильтрации передаваемой частоты.
Доплеровский анализ отраженных сигналов радара может позволить отфильтровать медленные или неподвижные объекты, тем самым обеспечивая невосприимчивость к помехам от крупных неподвижных объектов и медленно движущихся объектов. беспорядок.[2] Это делает его особенно полезным для поиска объектов на фоне отражателя, например, позволяя летящему на большой высоте самолету искать самолет, летящий на малой высоте, на фоне поверхности. Поскольку очень сильное отражение от поверхности можно отфильтровать, гораздо меньшее отражение от цели все еще можно увидеть.
Радиолокационные системы CW используются на обоих концах диапазона.
- Недорогие радиовысотомеры, датчики приближения и спортивные аксессуары, работающие на расстоянии от нескольких десятков футов до нескольких километров.
- Дорогостоящий предварительное оповещение Радиолокатор CW Angle Track (CWAT), работающий на расстоянии более 100 км, для использования с ракетными системами класса земля-воздух
Операция
Основное преимущество РЛС непрерывного действия заключается в том, что энергия не является импульсной, поэтому их намного проще производить и эксплуатировать. У них нет минимального или максимального диапазона, хотя уровень мощности вещания накладывает практический предел дальности. Радар непрерывного действия обеспечивает максимальную общую мощность на цели, поскольку передатчик ведет непрерывное вещание.
Военные используют радар непрерывного излучения для наведения полуактивная радиолокационная система самонаведения (SARH) ракеты класса "воздух-воздух", такой как НАС. AIM-7 Воробей и Стандартная ракета семья. Стартовый самолет освещает цель с непрерывным радиолокационным сигналом, а ракета - на отраженном радиоволны. Поскольку ракета движется с большими скоростями относительно самолета, возникает сильный доплеровский сдвиг. Самые современные радары воздушного боя, даже импульсный допплер наборы имеют функцию CW для наведения ракет.
Максимальное расстояние в радаре непрерывного действия определяется общей полосой пропускания и мощностью передатчика. Эта полоса пропускания определяется двумя факторами.
- Плотность энергии передачи (ватт на герц)
- Размер фильтра приемника (полоса пропускания, деленная на общее количество фильтров)
Удвоение мощности передачи увеличивает дальность связи примерно на 20%. Снижение общего шума передачи FM вдвое дает тот же эффект.
Частотный диапазон Приемники, используемые для непрерывных доплеровских радиолокационных приемников, сильно отличаются от обычных радиолокационных приемников. Приемник состоит из группы фильтров, обычно более 100. Количество фильтров определяет максимальную дальность действия.
Удвоение количества фильтров приемника увеличивает дальность действия примерно на 20%. Максимальное расстояние достигается, когда размер фильтра приемника равен максимальному ЧМ-шуму передаваемого сигнала. Уменьшение размера фильтра приемника ниже среднего уровня шума передачи FM не улучшит характеристики дальности.
Радиолокатор CW называется совпадает когда размер фильтра приемника соответствует среднеквадратичной ширине полосы частот FM-шума в передаваемом сигнале.
Типы
Есть два типа РЛС непрерывного действия: немодулированная непрерывная волна и модулированная непрерывная волна.
Немодулированная непрерывная волна

Такой радар может стоить менее 100 долларов (2012 г.). Возвратные частоты смещены от передаваемой частоты в зависимости от Эффект Допплера когда объекты движутся. Невозможно оценить расстояние. Этот тип радара обычно используется во время соревнований по видам спорта, таким как гольф, теннис, бейсбол и др. НАСКАР гонки.
Изменение доплеровской частоты зависит от скорость света в воздухе (c ’≈ c / 1.0003 немного медленнее, чем в вакууме) и v скорость цели:[3]

Доплеровская частота, таким образом, равна:[4]

Так как обычное изменение скорости цели у радара намного меньше, чем , можно упростить с помощью :



РЛС непрерывного действия без частотной модуляции (ЧМ) обнаруживает только движущиеся цели, как стационарные цели (вдоль Поле зрения ) не вызовет доплеровского сдвига. Отраженные сигналы от неподвижных и медленно движущихся объектов маскируются передаваемым сигналом, который подавляет отражения от медленно движущихся объектов во время нормальной работы.
Модулированная непрерывная волна
Радиолокатор непрерывного действия с частотной модуляцией (FM-CW) - также называется радар с непрерывной частотной модуляцией (CWFM).[5]- радиолокационная станция ближнего действия, способная определять дальность. Это увеличивает надежность, обеспечивая измерение расстояния наряду с измерением скорости, что важно, когда на антенну радара попадает более одного источника отражения. Такой радар часто используется как "радиолокационный высотомер «для измерения точной высоты при посадке самолета.[6] Он также используется как радар раннего предупреждения, волновой радар, и датчики приближения. Доплеровский сдвиг не всегда требуется для обнаружения при использовании FM. В то время как ранние реализации, такие как радарный высотомер APN-1 1940-х годов, были разработаны для малых дальностей, радары Over The Horizon Radar (OTHR), такие как Jindalee Operational Radar Network (JORN), предназначены для обзора межконтинентальных расстояний в несколько тысяч километров .
В этой системе передаваемый сигнал известной стабильной частоты непрерывная волна изменяется вверх и вниз по частоте в течение фиксированного периода времени модулирующим сигналом. Разность частот между принимаемым и передаваемым сигналами увеличивается с задержкой и, следовательно, с расстоянием. Это размывает или размывает доплеровский сигнал. Затем эхо от цели смешивается с передаваемым сигналом, чтобы произвести сигнал биения который даст расстояние до цели после демодуляции.
Возможны различные модуляции, частота передатчика может повышаться и понижаться следующим образом:
- Синусоидальная волна, как сирена воздушной тревоги
- Пилообразная волна как чириканье птицы
- Треугольник волна, как полицейская сирена в США
- Квадратная волна, как полицейская сирена в Соединенном Королевстве
Демодуляция диапазона ограничена 1/4 длины волны модуляции передачи. Приборная дальность для ЧМ 100 Гц составит 500 км. Этот предел зависит от типа модуляции и демодуляции. Обычно применяется следующее.

Радар сообщит неверное расстояние для отражений с расстояний за пределами инструментального диапазона, например, от Луны. Измерения диапазона FMCW надежны только примерно до 60% приборного диапазона, или примерно 300 км для 100 Гц FM.
Пилообразная частотная модуляция




Пилообразная модуляция чаще всего используется в радарах FM-CW, где требуется дальность действия для объектов, у которых отсутствуют вращающиеся части. С помощью этой техники информация о дальности смешивается с доплеровской скоростью. Модуляция может быть отключена при альтернативном сканировании для определения скорости с использованием немодулированного сдвига несущей частоты. Это позволяет определять дальность и скорость с помощью одного радара. Для достижения той же цели можно использовать модуляцию треугольной волны.
Как показано на рисунке, полученный сигнал (зеленый) - это просто задержанная копия переданного сигнала (красный). Переданная частота используется для преобразования принимаемого сигнала с понижением частоты до основная полоса, а величина сдвига частоты между передаваемым сигналом и отраженным сигналом увеличивается с временной задержкой (расстоянием). Таким образом, временная задержка является мерой диапазона; небольшой разброс частот создается соседними отражениями, больший разброс частот соответствует большей временной задержке и большему диапазону.
С появлением современной электроники цифровая обработка сигналов используется для большей части обработки обнаружения. Сигналы биений проходят через аналого-цифровой преобразователь, а результат выполняется цифровой обработкой. Как поясняется в литературе, диапазон FM-CW для линейной кривой нарастания задается в следующей системе уравнений:[6]

- куда - величина развертки частоты радара и время завершения развертки частоты.


Потом, , переставь на более полезный:

- , куда - время прохождения радиолокационной энергии туда и обратно.


В таком случае легко вычислить физическое расстояние в одну сторону для идеализированного типичного случая как:

- куда это скорость света в любой прозрачной среде показатель преломления n (n = 1 в вакууме и 1.0003 для воздуха).

По практическим соображениям принимаемые выборки не обрабатываются в течение короткого периода после начала линейного изменения модуляции, поскольку входящие отражения будут иметь модуляцию из предыдущего цикла модуляции. Это накладывает ограничение на диапазон и ограничивает производительность.

Синусоидальная частотная модуляция

Синусоидальная ЧМ используется, когда требуются одновременно и дальность, и скорость для сложных объектов с множеством движущихся частей, таких как лопасти вентилятора турбины, лопасти вертолета или пропеллеры. Эта обработка снижает эффект сложной модуляции спектра, создаваемой вращающимися частями, которые вносят ошибки в процесс измерения дальности.
Этот метод также имеет то преимущество, что приемнику никогда не нужно останавливать обработку входящих сигналов, потому что форма волны модуляции является непрерывной без импульсной модуляции.
Синусоидальная ЧМ полностью устраняется приемником для близких отражений, потому что частота передачи будет такой же, как частота, отраженная обратно в приемник. Спектр для более далеких объектов будет содержать больше модуляции. Величина расширения спектра, вызванная модуляцией принимаемого сигнала, пропорциональна расстоянию до отражающего объекта.
Формула временной области для FM:
![{ Displaystyle у (т) = соз влево {2 пи [е_ {с} + mathrm {B} соз влево (2 пи е_ {м} т вправо)] т вправо } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/20a17a89ddb7ead804135633080c560c5afc6337)
- куда (индекс модуляции)

При передаче между радаром и отражателем вводится временная задержка.
![{ Displaystyle у (т) = соз влево {2 пи [е_ {с} + mathrm {В} соз влево (2 пи е_ {м} (т + дельта т) вправо)] (т + дельта т) право } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a81f902951e8fadfedd127fca23ac60335717bab)
- куда временная задержка

В процессе обнаружения принимаемый сигнал преобразуется с понижением частоты с использованием передаваемого сигнала. Это устраняет перевозчика.
![{ Displaystyle у (т) = соз влево {2 пи [е_ {с} + mathrm {В} соз влево (2 пи е_ {м} (т + дельта т) вправо)] (t + delta t) right } ; cos left {2 pi [f_ {c} + mathrm {B} cos left (2 pi f_ {m} t right)] т верно},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ffb0b9f81c6bfab4e7f22d6c82c7fbfe4483cd42)

В Правило полосы пропускания Карсона можно увидеть в этом уравнении, и это близкое приближение для определения величины разброса в спектре приема:


Демодуляция приемника используется с FMCW аналогично стратегии демодуляции приемника, используемой со сжатием импульсов. Это происходит до Обработка обнаружения доплеровского CFAR. По практическим соображениям необходим большой индекс модуляции.
Практические системы вводят обратную ЧМ на принимаемом сигнале с использованием цифровой обработки сигнала перед быстрое преобразование Фурье процесс используется для получения спектра. Это повторяется с несколькими разными значениями демодуляции. Диапазон определяется путем определения спектра приема, ширина которого минимальна.
Практические системы также обрабатывают полученные образцы для нескольких циклов FM, чтобы уменьшить влияние артефактов дискретизации.
Конфигурации

В радарах непрерывного действия используются две разные конфигурации антенн: моностатический радар, и бистатический радар.
Моностатический
Приемная антенна радара расположена рядом с передающей антенной радара в моностатический радар.
Сквозной ноль обычно требуется для устранения просачивания между передатчиком и приемником для повышения чувствительности в практических системах. Обычно это используется с радиолокационными приемниками с непрерывным отслеживанием угла (CWAT), которые совместимы с ракета земля-воздух системы.
Прерывистая непрерывная волна может использоваться для устранения проступания между передающей и приемной антеннами. Система такого типа обычно берет одну выборку между каждой парой импульсов передачи, а частота выборки обычно составляет 30 кГц или более. Этот метод используется с самыми дешевыми видами радаров, такими как те, которые используются для мониторинга дорожного движения и занятий спортом.
Радиолокаторы FM-CW могут быть построены с одной антенной, использующей циркулятор или круговую поляризацию.
Бистатический
Приемная антенна радара расположена далеко от передающей антенны радара в бистатический радар. Передатчик довольно дорогой, а приемник довольно недорогой и одноразовый.
Обычно это используется с полуактивная радиолокационная система самонаведения включая большинство ракета земля-воздух системы. Передающий радар обычно находится рядом с ракетной установкой. Ствольная коробка находится в ракете.
Передающая антенна освещает цель во многом так же, как поисковый свет. Передающая антенна также выдает всенаправленный образец.
Приемник использует две антенны - одну антенну, направленную на цель, и одну антенну, направленную на передающую антенну. Приемная антенна, направленная на передающую антенну, используется для разработки сквозной нуль, что позволяет целевому приемнику надежно работать в основном луче антенны или рядом с ним.
Пара бистатических приемников и передатчиков FM-CW может также иметь форму системы снижения мощности по воздуху (OTAD). Передатчик OTAD передает сигнал FM-CW на двух разных частотных каналах; один для синхронизации приемника с передатчиком, другой для освещения сцены измерения. Используя направленные антенны, приемник OTAD собирает оба сигнала одновременно и смешивает сигнал синхронизации с эхо-сигналом, преобразованным с понижением частоты, от места измерения в процессе, известном как уменьшение амплитуды в эфире. Частота замедленного сигнала пропорциональна бистатическому диапазону до цели за вычетом базового расстояния между передатчиком OTAD и приемником OTAD.[7]
Большинство современных систем FM-CW радаров используют одну передающую антенну и несколько приемных антенн. Поскольку передатчик постоянно работает на той же частоте, что и приемник, необходимо проявлять особую осторожность, чтобы избежать перегрузки каскадов приемника.
Моноимпульс
Моноимпульсные антенны производят угловые измерения без импульсов или другой модуляции. Этот метод используется в полуактивная радиолокационная система самонаведения.
Утечка
В практических системах сигнал передачи будет попадать в приемник. Существенная утечка будет происходить из-за отражений от окружающей среды, даже если компоненты антенны исправны. Для достижения приемлемых характеристик требуется подавление утечки до 120 дБ.
Для создания практичной системы, которая будет правильно работать, можно использовать три подхода.
- Ноль
- Фильтр
- Прерывание
Подходы к нулю и фильтру должны использоваться с бистатическим радаром, например полуактивная радиолокационная система самонаведения по практическим причинам, потому что боковые лепестки осветительного радара будут освещать окружающую среду в дополнение к освещению главного лепестка цели. Аналогичные ограничения применяются к наземным РЛС непрерывного действия. Это увеличивает стоимость.
Прерывание относится к дешевым портативным моностатическим радиолокационным системам (полицейский радар и спортивные товары). Это непрактично для бистатических систем из-за стоимости и сложности, связанных с согласованием времени с ядерной точностью в двух разных местах.
Конструктивным ограничением, которое продвигает это требование, является динамический диапазон ограничение практических компонентов приемника, которые включают в себя полосовые фильтры, которые требуют времени для урегулирования.
Ноль
Нулевой подход принимает два сигнала:
- Образец передаваемого сигнала, просачивающегося в приемник
- Образец реального передаваемого сигнала
Фактический передаваемый сигнал поворачивается на 180 градусов, ослабляется и подается в приемник. Фазовый сдвиг и затухание устанавливаются с использованием обратной связи, полученной от приемника, чтобы компенсировать большую часть утечки. Типичное улучшение составляет порядка 30–70 дБ.
Фильтр
Подход с фильтром основан на использовании очень узкополосного режекторного фильтра, который устраняет низкоскоростные сигналы от ближайших отражателей. Область отклонения полосы охватывает от 10 миль в час до 100 миль в час в зависимости от ожидаемой среды. Типичное улучшение составляет от 30 до 70 дБ.
Прерывание, FMICW
Хотя системы с прерывистой несущей не считаются системами CW, рабочие характеристики в достаточной степени аналогичны групповым системам с прерыванием CW с чистым радаром CW, поскольку частота импульсов достаточно высока, и измерения дальности не могут быть выполнены без частотной модуляции (FM).
Этот метод отключает передатчик на время до начала выборки приемника. Помехи приемника уменьшаются примерно на 8,7 дБ за постоянную времени. Для уменьшения утечки на 120 дБ требуется 14 постоянных времени восстановления полосы пропускания между моментом выключения передатчика и началом выборки приемника.
Концепция прерывания широко используется, особенно в радиолокационных устройствах дальнего действия, где очень важна чувствительность приемника. Это широко известно как «частотно-модулированная прерывистая непрерывная волна» или FMICW.
Преимущества
Из-за простоты радиолокаторы непрерывного действия недороги в производстве, относительно безотказны, дешевы в обслуживании и полностью автоматизированы. Некоторые из них достаточно малы, чтобы их можно было носить в кармане. Более сложные радиолокационные системы непрерывного действия могут надежно обеспечивать точное обнаружение на расстоянии более 100 км, обеспечивая при этом освещение ракеты.
Рампа FMCW может быть сжата, обеспечивая дополнительное соотношение сигнал / шум, так что не требуется дополнительная мощность, которую потребовался бы импульсный радар без FM-модуляции. Это в сочетании с тем фактом, что оно является когерентным, означает, что можно использовать интегрирование Фурье, а не интегрирование по азимуту, обеспечивая превосходное соотношение сигнал / шум и доплеровское измерение.
Доплеровская обработка позволяет интегрировать сигнал между последовательными выборками приемника. Это означает, что количество выборок может быть увеличено для расширения диапазона обнаружения без увеличения мощности передачи. Этот метод может быть использован для производства недорогих маломощных маломощных невидимых радаров.
CW производительность аналогична Характеристики импульсного доплеровского радара по этой причине.
Ограничения
Немодулированный радар непрерывного действия не может измерять расстояние. Амплитуда сигнала обеспечивает единственный способ определить, какой объект соответствует какому измерению скорости, когда рядом с приемником находится более одного движущегося объекта, но информация об амплитуде бесполезна без измерения дальности для оценки размера цели. К движущимся объектам относятся птицы, летающие рядом с объектами перед антенной. Отражения от небольших объектов непосредственно перед приемником могут подавляться отражениями, попадающими в боковые лепестки антенны, от крупного объекта, расположенного сбоку, над или за радаром, например, деревья с ветром, дующим сквозь листья, высокая трава, поверхность моря. , грузовые поезда, автобусы, грузовики и самолеты.
Небольшие радиолокационные системы, в которых отсутствует модуляция дальности, надежны только при использовании с одним объектом в стерильной среде, свободной от растительности, самолетов, птиц, погодных явлений и других близлежащих транспортных средств.
С 20 дБ боковые лепестки антенны, грузовик или дерево с 1000 квадратных футов отражающей поверхности позади антенны могут производить сигнал такой же мощности, как автомобиль с 10 квадратными футами отражения перед небольшой ручной антенной. Требуется обследование местности, чтобы определить, будут ли портативные устройства работать надежно, потому что ненаблюдаемое дорожное движение и деревья позади оператора могут помешать наблюдениям, проводимым перед оператором.
Это типичная проблема с радар скорость пушки используется сотрудниками правоохранительных органов, мероприятиями NASCAR и другими видами спорта, такими как бейсбол, гольф и теннис. Помехи от второго радара, зажигания автомобиля, других движущихся объектов, движущихся лопастей вентилятора на намеченной цели и других источников радиочастоты будут искажать измерения. Эти системы ограничены длиной волны, которая составляет 0,02 метра при Группа Ku, поэтому разброс луча превышает 45 градусов, если антенна меньше 12 дюймов (0,3 метра). Значительные боковые лепестки антенны распространяются во всех направлениях, если только антенна не больше транспортного средства, на котором установлен радар.[8]
Подавление боковых лепестков и модуляция диапазона FM необходимы для надежной работы. Невозможно узнать направление приходящего сигнала без подавления боковых лепестков, для чего требуются две или более антенн, каждая со своим индивидуальным приемником. Невозможно узнать расстояние без модуляции диапазона FM.
Скорость, направление и расстояние - все это требуется, чтобы выделить отдельный объект.
Эти ограничения связаны с хорошо известными ограничениями базовой физики, которые нельзя преодолеть с помощью дизайна.
Правоохранительные органы включают ручной лазер в набор инструментов, необходимых правоохранительным органам для подтверждения достоверной скорости и местоположения отдельного транспортного средства в дорожном движении после того, как радар обнаруживает превышение скорости.[9][10][11]
Смотрите также
Библиография
- Удача, Дэвид Г. С. Частотно-модулированный радар, опубликовано McGraw-Hill, Нью-Йорк, 1949, 466 с.
- Стимсон, Джордж У. Введение в бортовой радар, 2-е изд., SciTech Publishing, 584 стр.
- Джесси Чжэн (2005). Оптическая частотно-модулированная непрерывная интерферометрия (FMCW). Springer. ISBN 978-0387230092.
Рекомендации
- ^ «РЛС непрерывного действия». Федерация американских ученых.
- ^ «Непрерывный радар». Radartutorial.eu.
- ^ Дитчберн, Р. В. (1991) [1961]. Свет. Dover Publications Inc., стр. 331–333. ISBN 0-486-66667-0.
- ^ Джеймс М. Риденур (1947). Разработка радиолокационных систем. Серия MIT Radiation Lab. 1. п. 629.
- ^ Джим Лесурф.«Улучшенные формы радара».accessdate = 24.01.2014.
- ^ а б «Частотно-модулированный радар непрерывного излучения». Radartutorial. Получено 2012-08-07.
- ^ М. Эш и другие., Новая архитектура мультистатического радара FMCW за счет снижения скорости по воздуху, Журнал датчиков IEEE, №99, 2015.
- ^ "Рейнджер ЭЗ". MPH Industries. Архивировано из оригинал 19 сентября 2011 г.. Получено 7 сентября 2011.
- ^ "Сталкер ручной полицейский лазер". Сталкер Радар. Архивировано из оригинал на 2013-11-11. Получено 2011-09-07.
- ^ «Лазерный датчик скорости». Цифровой союзник. Архивировано из оригинал на 02.09.2011.
- ^ "Speed Laser". MPH Industries. Архивировано из оригинал на 28 августа 2009 г.