Оскулирующий круг - Osculating circle
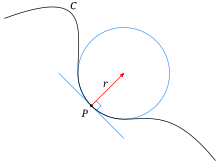

В дифференциальная геометрия кривых, то соприкасающийся круг достаточно гладкой плоскости изгиб в данный момент п на кривой традиционно определяется как круг, проходящий через п и пара дополнительных точек на кривой бесконечно мало рядом с п. Его центр находится на внутреннем нормальная линия, и это кривизна определяет кривизну данной кривой в этой точке. Этот круг, единственный среди всех касательные круги в данной точке, наиболее близко подходящей к кривой, был назван Circus osculans (На латыни «круг поцелуев») Лейбниц.
Центр и радиус соприкасающегося круга в данной точке называются центр кривизны и радиус кривизны кривой в этой точке. Геометрическая конструкция была описана Исаак Ньютон в его Principia:
В любых местах задана скорость, с которой тело описывает данную фигуру посредством сил, направленных к некоторому общему центру: найти этот центр.
— Исаак Ньютон, Principia; ПРЕДЛОЖЕНИЕ V. ПРОБЛЕМА I.
Нетехническое описание
Представьте себе машину, движущуюся по извилистой дороге по огромной плоской плоскости. Внезапно в какой-то момент на дороге рулевое колесо фиксируется в своем текущем положении. После этого машина движется по кругу, «целуя» дорогу в точке блокировки. В кривизна круга совпадает с дорогой в этой точке. Этот круг представляет собой соприкасающийся круг дорожного поворота в этой точке.
Математическое описание
Позволять (s) быть регулярная параметрическая плоская кривая, куда s это длина дуги (в естественный параметр ). Это определяет единичный касательный вектор Т(s), единичный вектор нормали N(s), знаковая кривизна к (с) и радиус кривизны R (s) в каждой точке, для которой s состоит:


Предположим, что п это точка на γ куда k ≠ 0. Соответствующим центром кривизны является точка Q на расстоянии р вдоль N, в том же направлении, если k положительно и в обратном направлении, если k отрицательный. Круг с центром в Q и с радиусом р называется соприкасающийся круг к кривой γ в момент п.
Если C регулярная пространственная кривая, то соприкасающийся круг определяется аналогичным образом, используя вектор главной нормали N. Он лежит в соприкасающаяся плоскость, плоскость, натянутая на касательную и главную нормаль Т и N в момент п.
Плоская кривая также может быть задана в другой регулярной параметризации

где обычный означает, что для всех . Тогда формулы для кривизны со знаком k(т) нормальный единичный вектор N(т) радиус кривизны р(т), а центр Q(т) соприкасающегося круга




Декартовы координаты
Мы можем получить центр соприкасающейся окружности в декартовых координатах, если подставим и для некоторых ж функция. Если мы проведем вычисления, то результаты для координат X и Y центра соприкасающегося круга будут:



Характеристики
Для кривой C заданный достаточно гладкими параметрическими уравнениями (дважды непрерывно дифференцируемыми), соприкасающаяся окружность может быть получена с помощью предельной процедуры: это предел окружностей, проходящих через три различные точки на C по мере приближения этих точек п.[2] Это полностью аналогично построению касательная кривой как предел секущих через пары различных точек на C приближающийся п.
Окружающий круг S к плоской кривой C в регулярной точке п можно охарактеризовать следующими свойствами:
- Круг S проходит через п.
- Круг S и кривая C иметь общая касательная линия на п, а значит, и обычная нормальная линия.
- Рядом с п, расстояние между точками кривой C и круг S в нормальном направлении затухает как куб или более высокая степень расстояния до п в тангенциальном направлении.
Обычно это выражается как «кривая и ее соприкасающийся круг имеют второй или более высокий порядок. контакт " в п. Грубо говоря, векторные функции, представляющие C и S согласуются вместе со своими первой и второй производными при п.
Если производная кривизны по s отличен от нуля в п затем соприкасающийся круг пересекает кривую C в п. Точки п при которых производная кривизны равна нулю, называются вершины. Если п является вершиной, то C и его соприкасающийся круг имеют контакт порядка не менее трех. Если к тому же кривизна имеет отличную от нуля локальный максимум или минимум на п затем соприкасающийся круг касается кривой C в п но не пересекает его.
Кривая C может быть получен как конверт однопараметрического семейства его соприкасающихся окружностей. Их центры, то есть центры кривизны, образуют другую кривую, называемую эволюционировать из C. Вершины C соответствуют особым точкам на его эволюции.
Внутри любой дуги кривой C в пределах которого кривизна монотонна (то есть вдали от любого вершина кривой) все соприкасающиеся круги не пересекаются и вложены друг в друга. Этот результат известен как Теорема Тейта-Кнезера.[1]
Примеры
Парабола

Для параболы

радиус кривизны

В вершине радиус кривизны равен R (0) = 0,5 (см. рисунок). Здесь парабола имеет контакт четвертого порядка со своим соприкасающимся кругом. Для больших т радиус кривизны увеличивается ~ т3, то есть кривая все больше выпрямляется.

Кривая Лиссажу

А Кривая Лиссажу с соотношением частот (3: 2) можно параметризовать следующим образом

Он подписал кривизну k(т), нормальный единичный вектор N(т) и радиус кривизны р(т) предоставлено


и

См. Рисунок для анимации. Здесь "вектор ускорения" - вторая производная с уважением к длина дуги .


Циклоида

А циклоида с радиусом r можно параметризовать следующим образом:

Его кривизна определяется следующей формулой:[3]

который дает:

Смотрите также
Примечания
- ^ а б Гиз, Этьен; Табачников Сергей; Тиморин, Владлен (2013). «Оскулирующие кривые: вокруг теоремы Тейта-Кнезера». Математический интеллект. 35 (1): 61–66. arXiv:1207.5662. Дои:10.1007 / s00283-012-9336-6. МИСТЕР 3041992. S2CID 18183204.
- ^ Собственно, точка п плюс два дополнительных очка, по одному с каждой стороны п Сделаю. См. Lamb (онлайн): Гораций Лэмб (1897). Элементарный курс исчисления бесконечно малых. University Press. п.406.
соприкасающийся круг.
- ^ Вайсштейн, Эрик В. «Циклоида». MathWorld.
дальнейшее чтение
Некоторые исторические заметки по изучению кривизны см.
- Граттан-Гиннесс и Х. Дж. М. Бос (2000). От исчисления к теории множеств 1630-1910: вводная история. Издательство Принстонского университета. п. 72. ISBN 0-691-07082-2.
- Рой Портер, редактор (2003). Кембриджская история науки: v4 - Наука восемнадцатого века. Издательство Кембриджского университета. п. 313. ISBN 0-521-57243-6.
По применению к маневрирующим транспортным средствам см.
- Джей Си Александр и Дж. Х. Мэддокс (1988): О маневрировании автомобилей Дои:10.1137/0148002
- Мюррей С. Кламкин (1990). Проблемы прикладной математики: отрывки из обзора SIAM. Общество промышленной и прикладной математики. п. 1. ISBN 0-89871-259-9.