Регулятор с малым падением напряжения - Low-dropout regulator


А регулятор с малым падением напряжения (Регулятор LDO) является DC линейный регулятор напряжения который может регулировать выход Напряжение даже когда напряжение питания очень близко к выходному напряжению.[1]
Преимущества низкого падение напряжения Этот стабилизатор по сравнению с другими регуляторами постоянного тока в постоянный включает отсутствие шума переключения (поскольку переключение не происходит), меньший размер устройства (поскольку не требуются ни большие индукторы, ни трансформаторы) и большую простоту конструкции (обычно состоит из эталона, усилителя и элемент прохода). Недостаток в том, что в отличие от регуляторы переключения линейные регуляторы постоянного тока должны рассеивать мощность и, таким образом, нагреваться на регулирующем устройстве, чтобы регулировать выходное напряжение.[2]
История
Регулируемый регулятор с малым падением напряжения дебютировал 12 апреля 1977 г. Электронный дизайн статья под названием "Освободитесь от фиксированных регуляторов IC". Статью написал Роберт Добкин, IC дизайнер тогда работал на National Semiconductor. По этой причине National Semiconductor претендует на титул "Изобретатель LDO".[3] Позже Добкин покинул National Semiconductor в 1981 году и основал Линейная технология где он был главным технологом.[4]
Составные части
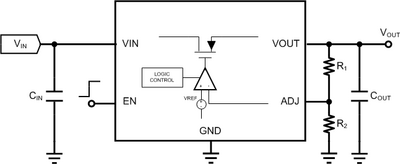
Основные компоненты - это силовой Полевой транзистор и дифференциальный усилитель (усилитель ошибки). Один вход дифференциального усилителя контролирует часть выхода, определяемую резистор соотношение R1 и R2. Второй вход на дифференциальный усилитель от опорного напряжения стабильного (ссылка на запрещенную зону ). Если выходное напряжение повышается слишком высоко относительно опорного напряжения, привод к мощности FET меняется, чтобы поддерживать выходное напряжение постоянным.
Регулирование
Регуляторы с малым падением напряжения (LDO) работают так же, как и все линейные регуляторы напряжения. Основное различие между регуляторами LDO и non-LDO заключается в их схемах. топология. Вместо эмиттер-повторитель топология, использование регуляторов с малым падением напряжения открытый коллектор или открытый сток топология. В этой топологии транзистор можно легко вставить в насыщенность с напряжениями, доступными для регулятора. Это позволяет падению напряжения от нерегулируемого напряжения до регулируемого напряжения на уровне, равном напряжению насыщения на транзисторе.[2]:Приложение
Для схемы, представленной на рисунке справа, выходное напряжение задается как:

Если биполярный транзистор используется, в отличие от полевой транзистор или же JFET, для управления им может быть потеряна значительная дополнительная мощность, тогда как регуляторы без LDO получают эту мощность от самого падения напряжения. Для высоких напряжений при очень малой разнице между входами и выходами в цепи управления будут существенные потери мощности.[5]
Поскольку элемент управления мощностью функционирует как инвертор, для управления им требуется другой инвертирующий усилитель, что увеличивает сложность схемы по сравнению с простым линейный регулятор.[нужна цитата ]
Мощность Полевые транзисторы может быть предпочтительнее для снижения энергопотребления, но это создает проблемы, когда регулятор используется для низкого входного напряжения, поскольку полевым транзисторам обычно требуется от 5 до 10 В для полного закрытия. Силовые полевые транзисторы также могут увеличить стоимость.
КПД и рассеивание тепла
Мощность, рассеиваемая в проходном элементе и внутренней схеме () типичного LDO рассчитывается следующим образом:


куда это ток покоя, необходимый LDO для его внутренней схемы.

Следовательно, можно рассчитать КПД следующим образом:
куда


Однако, когда LDO работает на полную мощность (т. Е. Подает ток на нагрузку), как правило: . Это позволяет снизить на следующее:


что дополнительно сокращает уравнение эффективности до:

При использовании линейного регулятора с малым падением напряжения важно учитывать тепловые характеристики. Наличие большого тока и / или большой разницы между входным и выходным напряжением может привести к значительному рассеянию мощности. Кроме того, эффективность пострадает по мере увеличения разницы. В зависимости от упаковка, чрезмерное рассеивание мощности может повредить LDO или привести к его тепловому отключению.
Ток покоя
Среди других важных характеристик линейного регулятора: ток покоя, также известный как ток заземления или ток питания, который объясняет разницу, хотя и небольшую, между входным и выходным токами LDO, а именно:

Ток покоя - это ток, потребляемый LDO для управления его внутренней схемой для правильной работы. Элемент прохода серии, топологии, и температура окружающей среды являются основными составляющими тока покоя.[6]
Для многих приложений не требуется, чтобы LDO постоянно работал в полную силу (то есть подавал ток на нагрузку). В этом состоянии ожидания LDO по-прежнему потребляет небольшой ток покоя, чтобы поддерживать внутреннюю схему наготове в случае наличия нагрузки. Когда на нагрузку не подается ток, можно найти следующим образом:

Фильтрация

Помимо регулирования напряжения, LDO также могут использоваться в качестве фильтры. Это особенно полезно, когда система использует переключатели, которые вводят рябь в выходном напряжении, возникающем при частоте переключения. Если оставить в покое, эта пульсация может отрицательно повлиять на производительность генераторы,[7] преобразователи данных,[8] и радиочастотные системы[9] питание от переключателя. Однако любой источник питания, а не только переключатели, может содержать элементы переменного тока, которые могут быть нежелательными для конструкции.
При использовании LDO в качестве фильтра следует учитывать две характеристики: коэффициент подавления источника питания (PSRR) и выходной шум.
Характеристики
LDO характеризуется выпадающим напряжением, током покоя, регулированием нагрузки, линейным регулированием, максимальным током (который определяется размером проходного транзистора), скоростью (насколько быстро он может реагировать при изменении нагрузки), колебаниями напряжения. на выходе из-за внезапных переходных процессов в токе нагрузки, выходном конденсаторе и его эквивалентном последовательном сопротивлении.[10] Скорость обозначается значком время нарастания тока на выходе, поскольку он изменяется от тока нагрузки 0 мА (без нагрузки) до максимального тока нагрузки. Это в основном определяется полосой пропускания усилителя ошибки. Также ожидается, что LDO будет обеспечивать тихий и стабильный выход при любых обстоятельствах (примером возможного возмущения может быть: внезапное изменение входного напряжения или выходного тока). Анализ стабильности позволил установить некоторые показатели производительности, чтобы получить такое поведение, и включил правильное размещение полюсов и нулей. В большинстве случаев доминирующий полюс возникает на низких частотах, в то время как другие полюса и нули выталкиваются на высоких частотах.
Коэффициент отклонения источника питания
PSRR относится к способности LDO подавлять пульсации, которые он видит на своем входе.[11] В рамках своего регулирования усилитель ошибки и запрещенная зона ослабляют любые всплески входного напряжения, которые отклоняются от внутреннего эталона, с которым оно сравнивается.[12] В идеальном LDO выходное напряжение должно состоять исключительно из частоты постоянного тока. Однако усилитель ошибки ограничен в способности получать небольшие выбросы на высоких частотах. PSRR выражается следующим образом:[11]

Например, LDO, который имеет PSRR 55 дБ на 1 МГц, ослабляет входные пульсации 1 мВ на этой частоте до 1,78 мкВ на выходе. Увеличение PSRR на 6 дБ примерно соответствует увеличению затухания в 2 раза.
Большинство LDO имеют относительно высокий PSRR на более низких частотах (10 Гц - 1 кГц). Тем не менее, Performance LDO отличается высоким PSRR в широком диапазоне частот (10 Гц - 5 МГц). Наличие высокого PSRR в широкой полосе частот позволяет LDO подавлять высокочастотный шум, подобный тому, который возникает от коммутатора. Как и в других спецификациях, PSRR колеблется в зависимости от частоты, температуры, тока, выходного напряжения и разности напряжений.
Выходной шум
При проектировании фильтра также необходимо учитывать шум от самого LDO. Как и другие электронные устройства, на LDO влияют: тепловой шум, биполярный дробовой шум, и мерцающий шум.[9] Каждое из этих явлений вносит свой вклад в выходное напряжение, в основном сосредоточенное в нижней части частотного спектра. Чтобы правильно фильтровать частоты переменного тока, LDO должен как подавлять пульсации на входе, так и вносить минимальный шум на выходе. Попытки ослабить пульсации входного напряжения могут оказаться напрасными, если зашумленный LDO просто снова добавит этот шум на выходе.
Регулирование нагрузки
Регулировка нагрузки - это мера способности схемы поддерживать заданное выходное напряжение при различных условиях нагрузки. Регулирование нагрузки определяется как:

Наихудший случай колебаний выходного напряжения происходит, когда ток нагрузки переходит от нуля до максимального номинального значения или наоборот.[6]
Линия регулирования
Регулировка линии - это мера способности схемы поддерживать заданное выходное напряжение при изменении входного напряжения. Линейное регулирование определяется как:

Как и регулирование нагрузки, линейное регулирование является параметром установившегося состояния - все частотные составляющие не учитываются. Увеличение коэффициента усиления постоянного тока без обратной связи улучшает линейное регулирование.[6]
Переходный ответ
Переходная характеристика - это максимально допустимое изменение выходного напряжения для скачкообразного изменения тока нагрузки. Переходная характеристика является функцией величины выходного конденсатора (), эквивалентное последовательное сопротивление (ESR) выходного конденсатора, байпасного конденсатора (), который обычно добавляется к выходному конденсатору для улучшения переходной характеристики нагрузки, и максимального тока нагрузки (). Максимальное изменение переходного напряжения определяется следующим образом:




Где соответствует полосе пропускания с обратной связью стабилизатора LDO. - изменение напряжения в результате наличия ESR () выходного конденсатора. Приложение определяет, насколько низким должно быть это значение.



Смотрите также
- Линейный регулятор
- Регулятор напряжения
- Импульсный источник питания
- Список линейных интегральных схем
- LM7805
Рекомендации
- ^ Пол Горовиц и Уинфилд Хилл (1989). Искусство электроники. Издательство Кембриджского университета. С. 343–349. ISBN 978-0-521-37095-0.
- ^ а б Джим Уильямс (1 марта 1989 г.). «Высокоэффективные линейные регуляторы». Линейная технология. Получено 2014-03-29.
- ^ Регуляторы с малым падением напряжения, линейные регуляторы, линейный стабилизатор CMOS
- ^ Дон Туите (1 сентября 2007 г.). «Изобретатель обновляет классику 30 лет спустя». Архивировано из оригинал 15 октября 2007 г.. Получено 9 октября, 2007.
- ^ Симпсон, Честер. «Основы линейных и импульсных регуляторов напряжения». ti.com. Инструменты Техаса. Получено 18 июн 2015.
- ^ а б c d Ли, Банг С. «Понимание терминов и определений регуляторов напряжения LDO». Инструменты Техаса. Получено 30 августа 2013.
- ^ Мохаммед, Хабиб. «Влияние шума источника питания на фазовый шум генератора».
- ^ Рамус, Ксавьер. «Измерение PSR в АЦП».
- ^ а б Питадиа, Санджай. "Демистификация шума LDO". Инструменты Техаса.
- ^ Токоэффективный низковольтный LDO-стабилизатор Тезис Ринкон-Мора
- ^ а б Питадиа, Санджай. «Упрощенное измерение LDO PSRR». Инструменты Техаса.
- ^ День, Майкл. "Понимание регуляторов с малым выпадением (LDO)". Инструменты Техаса.