Бак-конвертер - Buck converter
Эта статья нужны дополнительные цитаты для проверка. (Январь 2009 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |

А понижающий преобразователь (понижающий преобразователь) это Преобразователь постоянного тока в постоянный который снижает напряжение (при увеличении тока) от входа (питания) к выходу (нагрузки). Это класс импульсный источник питания (SMPS) обычно содержит как минимум два полупроводника (a диод и транзистор, хотя современные понижающие преобразователи часто заменяют диод вторым транзистором, используемым для синхронное выпрямление ) и по крайней мере один элемент накопления энергии, a конденсатор, индуктор, или два в комбинации. Чтобы уменьшить пульсации напряжения, фильтры, изготовленные из конденсаторов (иногда в сочетании с индукторами), обычно добавляются к выходу (фильтр на стороне нагрузки) и входу (фильтр на стороне питания) такого преобразователя.[1]
Коммутационные преобразователи (например, понижающие преобразователи) обеспечивают гораздо большую энергоэффективность как преобразователи постоянного тока в постоянный, чем линейные регуляторы, которые представляют собой более простые схемы, которые понижают напряжение за счет рассеивания мощности в виде тепла, но не повышают выходной ток.[2]
Понижающие преобразователи могут быть очень эффективными (часто выше 90%), что делает их полезными для таких задач, как преобразование основного (основного) напряжения питания компьютера (часто 12 V) до более низких напряжений, необходимых для USB, DRAM и ЦПУ (1.8 V или меньше).
Теория Операции


Основная операция понижающего преобразователя заключается в том, что ток в индуктор управляется двумя переключателями (обычно транзистор и диод ). В идеализированном преобразователе все компоненты считаются идеальными. В частности, переключатель и диод имеют нулевое падение напряжения при включении и нулевой ток в выключенном состоянии, а индуктор имеет нулевое последовательное сопротивление. Кроме того, предполагается, что входное и выходное напряжения не изменяются в течение цикла (это означает, что выходная емкость бесконечный ).
Концепция
Концептуальную модель понижающего преобразователя лучше всего понять с точки зрения соотношения между током и напряжением индуктора. Начиная с разомкнутого переключателя (выключенного состояния), ток в цепи равен нулю. Когда переключатель в первый раз замкнут (во включенном состоянии), ток начнет увеличиваться, и индуктор будет создавать противоположное напряжение на своих выводах в ответ на изменение тока. Это падение напряжения противодействует напряжению источника и, следовательно, снижает сетевое напряжение на нагрузке. Со временем скорость изменения тока уменьшается, а затем уменьшается и напряжение на катушке индуктивности, увеличивая напряжение на нагрузке. За это время индуктор накапливает энергию в виде магнитное поле. Если переключатель размыкается, когда ток все еще изменяется, то всегда будет падение напряжения на катушке индуктивности, поэтому сетевое напряжение на нагрузке всегда будет меньше, чем у источника входного напряжения. Когда переключатель снова разомкнут (выключенное состояние), источник напряжения будет удален из цепи, и ток уменьшится. Уменьшение тока вызовет падение напряжения на катушке индуктивности (противоположное падению во включенном состоянии), и теперь катушка индуктивности становится источником тока. Накопленная энергия в магнитном поле индуктора поддерживает ток через нагрузку. Этот ток, протекающий при отключенном источнике входного напряжения, при добавлении к току, протекающему во включенном состоянии, составляет в сумме ток, превышающий средний входной ток (равен нулю в выключенном состоянии). «Увеличение» среднего тока компенсирует снижение напряжения и в идеале сохраняет мощность, подаваемую на нагрузку. В выключенном состоянии катушка индуктивности разряжает накопленную энергию в остальную часть цепи. Если переключатель снова замкнут до того, как индуктор полностью разрядится (в открытом состоянии), напряжение на нагрузке всегда будет больше нуля.
Непрерывный режим
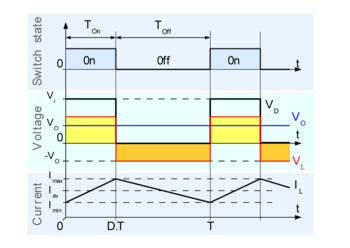
Понижающий преобразователь работает в непрерывном режиме, если ток через дроссель () никогда не падает до нуля во время цикла коммутации. В этом режиме принцип работы описывается графиками на рисунке 4:

- Когда переключатель, изображенный выше, замкнут (верхняя часть рисунка 2), напряжение на катушке индуктивности равно . Ток через катушку индуктивности растет линейно (приблизительно, пока падение напряжения почти постоянно). Поскольку диод смещен в обратном направлении источником напряжения V, ток через него не течет;
- Когда переключатель открыт (внизу рисунка 2), диод смещен в прямом направлении. Напряжение на катушке индуктивности равно (без учета падения на диоде). Текущий уменьшается.


Энергия, запасенная в индукторе L, равна

Следовательно, можно видеть, что энергия, запасенная в L, увеличивается во время работы по мере того, как увеличивается, а затем уменьшается в выключенном состоянии. L используется для передачи энергии от входа к выходу преобразователя.
Скорость изменения можно рассчитать из:

С равно во включенном состоянии и в в выключенном состоянии. Следовательно, увеличение тока во включенном состоянии определяется выражением:




куда скаляр, называемый рабочий цикл со значением от 0 до 1.

И наоборот, уменьшение тока в выключенном состоянии определяется выражением:

Если предположить, что преобразователь работает в установившемся режиме, энергия, запасенная в каждом компоненте в конце цикла коммутации T, будет равна энергии в начале цикла. Это означает, что текущий то же самое в и в (рисунок 4).


Итак, мы можем написать из приведенных выше уравнений:

Вышеуказанные интеграции могут быть выполнены графически. На рисунке 4 пропорциональна площади желтой поверхности, а к области оранжевой поверхности, так как эти поверхности определяются напряжением индуктора (красные линии). Поскольку эти поверхности представляют собой простые прямоугольники, их области можно легко найти: для желтого прямоугольника и для оранжевого. Для стабильной работы эти площади должны быть равными.




Как видно на рисунке 4, и .


Это дает:

Из этого уравнения видно, что выходное напряжение преобразователя линейно изменяется с рабочим циклом для данного входного напряжения. Как рабочий цикл равно соотношению между и период , оно не может быть больше 1. Следовательно, . Вот почему этот преобразователь упоминается как понижающий преобразователь.



Так, например, для ступенчатого понижения 12 В до 3 В (выходное напряжение, равное четверти входного напряжения), в нашей теоретически идеальной схеме потребуется рабочий цикл 25%.
Прерывистый режим

В некоторых случаях количество энергии, требуемое нагрузкой, слишком мало. В этом случае ток через катушку индуктивности падает до нуля в течение части периода. Единственное различие в описанном выше принципе состоит в том, что индуктор полностью разряжается в конце цикла коммутации (см. Рисунок 5). Однако это оказывает некоторое влияние на предыдущие уравнения.
Падение тока катушки индуктивности ниже нуля приводит к разрядке выходного конденсатора во время каждого цикла и, следовательно, к более высоким коммутационным потерям. Другой метод управления, известный как Частотно-импульсная модуляция можно использовать для минимизации этих потерь.
Мы по-прежнему считаем, что преобразователь работает в установившемся режиме. Следовательно, энергия в индукторе одинакова в начале и в конце цикла (в случае прерывистого режима она равна нулю). Это означает, что среднее значение напряжения индуктора (ВL) равно нулю; т.е. что площади желтого и оранжевого прямоугольников на рисунке 5 одинаковы. Это дает:

Таким образом, значение δ равно:

Выходной ток, подаваемый на нагрузку () является постоянным, поскольку мы считаем, что выходной конденсатор достаточно большой, чтобы поддерживать постоянное напряжение на его выводах во время цикла коммутации. Это означает, что ток, протекающий через конденсатор, имеет нулевое среднее значение. Таким образом, мы имеем:


Где - среднее значение тока индуктора. Как видно на рисунке 5, форма волны тока индуктора имеет треугольную форму. Следовательно, среднее значение IL можно разобрать геометрически следующим образом:


Ток индуктора вначале равен нулю и возрастает в течение tна до меняLmax. Это означает, что яLmax равно:

Подставляя значение ILmax в предыдущем уравнении приводит к:

И замена δ выражением, приведенным выше, дает:

Это выражение можно переписать как:

Видно, что выходное напряжение понижающего преобразователя, работающего в прерывистом режиме, намного сложнее, чем его аналог в непрерывном режиме. Кроме того, выходное напряжение теперь зависит не только от входного напряжения (Vя) и рабочий цикл D, но также значение индуктивности (L), период коммутации (T) и выходной ток (Iо).
Из прерывистого в непрерывный режим (и наоборот)
Как упоминалось в начале этого раздела, преобразователь работает в прерывистом режиме, когда нагрузка потребляет низкий ток, и в непрерывном режиме при более высоких уровнях тока нагрузки. Предел между прерывистым и непрерывным режимами достигается, когда ток индуктора падает до нуля точно в конце цикла коммутации. Используя обозначения на рисунке 5, это соответствует:

Следовательно, выходной ток (равный среднему току индуктора) на границе между прерывистым и непрерывным режимами равен (см. Выше):

Подставляя ILmax по стоимости:

На границе между двумя режимами выходное напряжение подчиняется обоим выражениям, данным соответственно в непрерывной и прерывистой частях. В частности, первое

Так что яОлим можно записать как:

Теперь введем еще два обозначения:
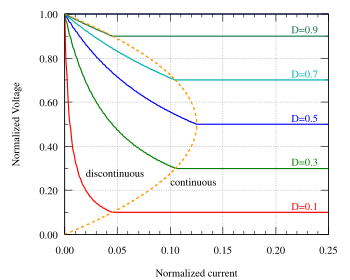
- нормализованное напряжение, определяемое . Это ноль, когда , и 1, когда ;
- нормализованный ток, определяемый . Период, термин равно максимальному увеличению тока индуктора за цикл; т.е. увеличение тока индуктора при скважности D = 1. Итак, в установившемся режиме работы преобразователя это означает, что равен 0 для отсутствия выходного тока и 1 для максимального тока, который может выдавать преобразователь.






Используя эти обозначения, мы имеем:
- в непрерывном режиме:
- в прерывистом режиме:


ток на границе между непрерывным и прерывистым режимами составляет:

Следовательно, геометрическое место границы между непрерывным и прерывистым режимами задается следующим образом:

Эти выражения представлены на рисунке 6. Из этого можно сделать вывод, что в непрерывном режиме выходное напряжение зависит только от рабочего цикла, тогда как в прерывистом режиме оно гораздо сложнее. Это важно с точки зрения контроля.
На уровне схемы определение границы между CCM и DCM обычно обеспечивается измерением тока индуктора, что требует высокой точности и быстрых детекторов, таких как:[3][4]
Неидеальная схема
Предыдущее исследование проводилось при следующих предположениях:
- Выходной конденсатор имеет достаточную емкость для подачи питания на нагрузку (простое сопротивление) без каких-либо заметных колебаний ее напряжения.
- Падение напряжения на диоде при прямом смещении равно нулю.
- Отсутствуют коммутационные потери в переключателе и диоде.
Эти предположения могут быть довольно далеки от реальности, а недостатки реальных компонентов могут отрицательно сказаться на работе преобразователя.
Колебания выходного напряжения (непрерывный режим)
Пульсации выходного напряжения - это название явления, когда выходное напряжение повышается во включенном состоянии и падает во время выключенного состояния. Этому способствуют несколько факторов, включая, помимо прочего, частоту переключения, выходную емкость, индуктивность, нагрузку и любые токоограничивающие характеристики схемы управления. На самом базовом уровне выходное напряжение будет расти и падать в результате зарядки и разрядки выходного конденсатора:

Мы можем наилучшим образом аппроксимировать пульсацию выходного напряжения, сдвинув выходной ток в зависимости от формы волны во времени (непрерывный режим) вниз так, чтобы средний выходной ток находился вдоль оси времени. Когда мы это делаем, мы видим, что форма волны переменного тока течет в выходной конденсатор и выходит из него (пилообразная форма волны). Отметим, что Vc-min (где Vc - напряжение конденсатора) возникает при t-on / 2 (сразу после того, как конденсатор разрядился), а Vc-max при t-off / 2. Интегрируя Idt (= dQ; поскольку I = dQ / dt, C = Q / V, поэтому dV = dQ / C) под формой выходного тока, записывая выходное пульсирующее напряжение как dV = Idt / C, мы интегрируем область над осью в получить размах пульсаций напряжения как: дельта V = дельта I * T / 8C (где дельта I - это амплитудный ток пульсаций, а T - период пульсаций; подробности см. на вкладке Talk, если вы можете Здесь нет графической обработки областей. Полное объяснение дано там.) Мы отмечаем из базовой теории цепей переменного тока, что наше пульсирующее напряжение должно быть примерно синусоидальным: полное сопротивление конденсатора, умноженное на размах амплитуды пульсаций тока, или дельта V = дельта I / (2 * omega * C), где omega = 2 * pi * f, f - частота пульсаций, а f = 1 / T, T - период пульсаций. Это дает: дельта V = дельта I * T / (2 * pi * C), и мы сравниваем это значение, чтобы подтвердить вышеизложенное, поскольку у нас есть коэффициент 8 против коэффициента ~ 6,3 из базовой теории цепей переменного тока для синусоида. Это дает уверенность в нашей оценке пульсаций напряжения. Параграф непосредственно ниже относится к параграфу выше и может быть неверным. Используйте уравнения из этого абзаца. Еще раз, пожалуйста, смотрите вкладку разговоров, чтобы узнать больше: относящееся к выходному пульсирующему напряжению и AoE (Art of Electronics 3rd edition).
В выключенном состоянии ток в этом уравнении является током нагрузки. Во включенном состоянии ток - это разница между током переключения (или током источника) и током нагрузки. Продолжительность времени (dT) определяется рабочим циклом и частотой переключения.
Для включенного состояния:

Для выключенного состояния:

Качественно, когда выходной конденсатор или частота коммутации увеличиваются, величина пульсаций уменьшается. Пульсации выходного напряжения обычно являются проектной спецификацией для источника питания и выбираются на основе нескольких факторов. Выбор конденсатора обычно определяется стоимостью, физическим размером и неидеальностью различных типов конденсаторов. Выбор частоты переключения обычно определяется на основе требований к эффективности, которая имеет тенденцию к снижению при более высоких рабочих частотах, как описано ниже в Влияние неидеальности на эффективность. Более высокая частота коммутации также может вызвать проблемы с электромагнитными помехами.
Пульсации выходного напряжения - один из недостатков импульсного источника питания, который также может служить мерой его качества.
Влияние неидеальности на эффективность
Упрощенный анализ понижающего преобразователя, как описано выше, не учитывает неидеальность компонентов схемы и не учитывает требуемую схему управления. Потери мощности из-за схемы управления обычно незначительны по сравнению с потерями в силовых устройствах (переключателях, диодах, индукторах и т. Д.). Неидеальности силовых устройств составляют основную часть потерь мощности в преобразователе.
В любом импульсном регуляторе возникают как статические, так и динамические потери мощности. Статические потери мощности включают (проводящие) потери в проводах или дорожках печатной платы, а также в переключателях и индуктивности, как и в любой электрической цепи. Динамические потери мощности возникают в результате переключения, такого как зарядка и разрядка затвора переключателя, и пропорциональны частоте переключения.

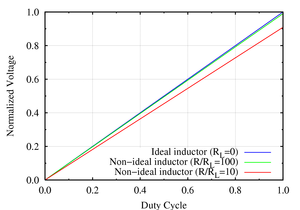
Полезно начать с расчета рабочего цикла для неидеального понижающего преобразователя, который:

куда:
- Vsw падение напряжения на выключателе питания,
- Vsw, синхронизация падение напряжения на синхронном переключателе или диоде, и
- VL падение напряжения на катушке индуктивности.
Описанные выше падения напряжения - это все статические потери мощности, которые зависят в первую очередь от постоянного тока и поэтому могут быть легко рассчитаны. Для диодного падения Vsw и Vsw, синхронизация может быть уже известен, исходя из свойств выбранного устройства.

куда:
- рна - сопротивление каждого переключателя во включенном состоянии;
- рОКРУГ КОЛУМБИЯ - сопротивление катушки индуктивности постоянному току.
Уравнение рабочего цикла несколько рекурсивно. Грубый анализ можно сделать, предварительно рассчитав значения Vsw и Vsw, синхронизация с использованием уравнения идеального рабочего цикла.
Для падения напряжения полевого МОП-транзистора обычным приближением является использование RDSon из таблицы данных MOSFET в законе Ома, V = IDSрDSon (сб). Это приближение приемлемо, поскольку полевой МОП-транзистор находится в линейном состоянии с относительно постоянным сопротивлением сток-исток. Это приближение справедливо только при относительно низком VDS значения. Для более точных расчетов таблицы данных MOSFET содержат графики на VDS и яDS отношения при нескольких VGS значения. Соблюдайте VDS на VGS и яDS которые наиболее точно соответствуют тому, что ожидается в понижающем преобразователе.[5]
Кроме того, потеря мощности происходит из-за токов утечки. Эта потеря мощности просто

куда:
- яутечка - ток утечки переключателя, а
- V напряжение на переключателе.
Динамические потери мощности связаны с режимом переключения выбранных проходных устройств (МОП-транзисторы, силовые транзисторы, БТИЗ, так далее.). Эти потери включают потери при включении и выключении, а также потери при переключении.
Потери при включении и выключении легко объединить в одну:

куда:
- V напряжение на переключателе, когда переключатель выключен,
- тподъем и тОсень время подъема и спада переключателя, и
- Т период переключения
но это не учитывает паразитную емкость MOSFET, которая делает Пластина Миллера. Тогда потери переключения будут больше похожи на:

Когда полевой МОП-транзистор используется для нижнего переключателя, дополнительные потери могут возникать в течение времени между выключением переключателя на стороне высокого напряжения и включением переключателя на стороне низкого давления, когда основной диод полевого МОП-транзистора низкого уровня проводит выходной ток. Это время, известное как время отсутствия перекрытия, предотвращает «пробег», состояние, при котором оба переключателя включены одновременно. Начало прорыва приводит к серьезным потерям мощности и нагреву. Правильный выбор времени без перекрытия должен уравновесить риск пробоя с увеличением потерь мощности, вызванных проводимостью внутреннего диода. Многие понижающие преобразователи на основе полевых МОП-транзисторов также включают в себя диод, который помогает нижнему корпусному диоду полевого МОП-транзистора обеспечивать проводимость во время отсутствия перекрытия. Когда диод используется исключительно для нижнего переключателя, время прямого включения диода может снизить эффективность и привести к выбросу напряжения.[6]
Потери мощности на внутреннем диоде также пропорциональны частоте переключения и составляют

куда:
- VF - прямое напряжение основного диода, а
- тнет - выбранное время без перекрытия.
Наконец, потери мощности возникают из-за мощности, необходимой для включения и выключения переключателей. Для переключателей MOSFET в этих потерях преобладает энергия, необходимая для заряда и разряда емкости затвора MOSFET между пороговое напряжение и выбранное напряжение затвора. Эти коммутационные переходные потери возникают в основном в драйвере затвора и могут быть минимизированы путем выбора полевых МОП-транзисторов с низким зарядом затвора, перевода затвора полевого МОП-транзистора на более низкое напряжение (за счет увеличения потерь проводимости полевого МОП-транзистора) или работы на более низкой частоте .

куда:
- Qграмм - заряд затвора выбранного полевого МОП-транзистора, и
- VGS - пиковое напряжение затвор-исток.
Для N-MOSFET переключатель верхнего плеча должен быть переведен на более высокое напряжение, чем Vя. Для этого драйверы затвора MOSFET обычно подают выходное напряжение MOSFET обратно в драйвер затвора. Затем драйвер затвора добавляет свое собственное напряжение питания к выходному напряжению полевого МОП-транзистора при возбуждении полевых МОП-транзисторов верхнего плеча для достижения VGS равным напряжению питания драйвера затвора.[7] Потому что низкая сторона VGS напряжение питания драйвера затвора, это приводит к очень похожему VGS значения для полевых МОП-транзисторов с верхней и нижней стороны.
Полная конструкция понижающего преобразователя включает анализ компромиссов различных потерь мощности. Дизайнеры уравновешивают эти потери в соответствии с ожидаемым использованием готовой конструкции. Преобразователь, который должен иметь низкую частоту переключения, не требует переключателей с низкими переходными потерями затвора; преобразователь, работающий с высоким рабочим циклом, требует переключателя на стороне низкого напряжения с низкими потерями проводимости.
Конкретные конструкции
Синхронное выпрямление

Синхронный понижающий преобразователь - это модифицированная версия базовой топологии схемы понижающего преобразователя, в которой диод D заменен вторым переключателем S.2. Эта модификация представляет собой компромисс между повышенной стоимостью и улучшенной эффективностью.
В стандартном понижающем преобразователе обратный диод включается сам по себе вскоре после выключения переключателя в результате повышения напряжения на диоде. Это падение напряжения на диоде приводит к потере мощности, равной

куда:
- VD падение напряжения на диоде при токе нагрузки яо,
- D - рабочий цикл, а
- яо ток нагрузки.
Путем замены диода переключателем, выбранным с учетом низких потерь, можно повысить эффективность преобразователя. Например, полевой МОП-транзистор с очень низким рDSon может быть выбран для S2, обеспечивая потерю мощности на переключателе 2 который

В обоих случаях потери мощности сильно зависят от рабочего цикла D. Потери мощности на диоде свободного хода или нижнем переключателе будут пропорциональны его времени включения. Следовательно, системы, предназначенные для работы с низким рабочим циклом, будут страдать от более высоких потерь в обратном диоде или более низком переключателе, и для таких систем выгодно рассмотреть конструкцию синхронного понижающего преобразователя.
Рассмотрим блок питания компьютера, где на входе 5 В, на выходе 3,3 В, а ток нагрузки 10 A. В этом случае рабочий цикл будет 66%, а диод будет включен 34% времени. Типичный диод с прямым напряжением 0,7 В будет иметь потерю мощности 2,38 Вт. Хорошо подобранный полевой МОП-транзистор с RDSon 0,015 Ом, однако, приведет к потере проводимости всего 0,51 Вт. Это приводит к повышению эффективности и снижению тепловыделения.
Еще одним преимуществом синхронного преобразователя является его двунаправленность, что позволяет использовать его в приложениях, требующих рекуперативное торможение. Когда мощность передается в «обратном» направлении, она действует как повышающий преобразователь.
Преимущества синхронного понижающего преобразователя не обходятся без затрат. Во-первых, нижний переключатель обычно стоит дороже, чем диод свободного хода. Во-вторых, сложность преобразователя значительно возрастает из-за необходимости в драйвере переключателя с дополнительным выходом.
Такой драйвер должен предотвращать одновременное включение обоих переключателей, ошибка, известная как «пробег». Самый простой способ избежать пробоя - это выдержка времени между выключением S1 до включения S2, наоборот. Однако установка этой выдержки времени достаточно большой, чтобы гарантировать, что S1 и S2 никогда не включаются оба, само по себе приведет к избыточной потере мощности. Усовершенствованный метод предотвращения этого состояния известен как адаптивная защита «без перекрытия», при которой напряжение в коммутационном узле (точка, где S1, S2 и L соединены), чтобы определить его состояние. Когда напряжение коммутирующего узла превышает заданный порог, запускается временная задержка. Таким образом, драйвер может приспособиться ко многим типам переключателей без чрезмерных потерь мощности, которые эта гибкость могла бы вызвать при фиксированном времени отсутствия перекрытия.
Многофазный бак


Многофазный понижающий преобразователь представляет собой топологию схемы, в которой основные схемы понижающего преобразователя размещаются параллельно между входом и нагрузкой. Каждый из п "фазы" включаются через равные интервалы в течение периода переключения. Эта схема обычно используется с синхронный доллар топология, описанная выше.
Этот тип преобразователя может реагировать на изменения нагрузки так же быстро, как если бы он переключался. п раз быстрее, без увеличения потерь при переключении. Таким образом, он может реагировать на быстро меняющиеся нагрузки, такие как современные микропроцессоры.
Также наблюдается значительное уменьшение пульсаций переключения. Не только уменьшение из-за увеличения эффективной частоты,[8] но в любое время, когда п если рабочий цикл является целым числом, пульсация переключения становится равной 0; скорость, с которой ток индуктора увеличивается в включенных фазах, точно соответствует скорости, с которой он уменьшается в выключенных фазах.
Еще одно преимущество состоит в том, что ток нагрузки распределяется между п фазы многофазного преобразователя. Такое разделение нагрузки позволяет распределить тепловые потери на каждом из переключателей по большей площади.
Эта топология схемы используется в материнских платах компьютеров для преобразования напряжения 12 В.ОКРУГ КОЛУМБИЯ источник питания на более низкое напряжение (около 1 В), подходящее для ЦПУ. Требования к мощности современного процессора могут превышать 200 W,[9] могут очень быстро меняться и иметь очень жесткие требования к пульсации, менее 10 мВ. Типичные блоки питания материнской платы используют 3 или 4 фазы.
Одной из основных проблем, присущих многофазному преобразователю, является обеспечение равномерного распределения тока нагрузки по п фазы. Уравновешивание токов может быть выполнено несколькими способами. Ток можно измерить «без потерь», измерив напряжение на катушке индуктивности или нижнем переключателе (когда он включен). Этот метод считается без потерь, потому что он основан на резистивных потерях, присущих топологии понижающего преобразователя. Другой способ - вставить в схему небольшой резистор и измерить напряжение на нем. Этот подход является более точным и регулируемым, но требует нескольких затрат - места, эффективности и денег.
Наконец, можно измерить ток на входе. Напряжение можно измерить без потерь, через верхний переключатель или с помощью силового резистора, чтобы приблизительно определить потребляемый ток. Этот подход технически более сложен, поскольку шум переключения не может быть легко отфильтрован. Однако это дешевле, чем наличие резистора считывания для каждой фазы.
Факторы эффективности
Потери проводимости, зависящие от нагрузки:
- Сопротивление, когда транзистор или переключатель MOSFET в проводящем состоянии.
- Прямое падение напряжения на диоде (обычно 0,7 В или же 0,4 В за диод шоттки )
- Сопротивление обмотки индуктора
- Эквивалентное последовательное сопротивление конденсатора
Коммутационные потери:
- Потери при перекрытии напряжение-ампер
- Частотавыключатель*РЕЗЮМЕ2 потеря
- Обратные латентные потери
- Потери из-за управления затвором MOSFET и потребления контроллера.
- Потери тока утечки транзистора и потребление контроллера в режиме ожидания.[10]
Согласование импеданса
Понижающий преобразователь можно использовать для максимизировать передачу мощности за счет использования согласование импеданса. Применение этого находится в трекер максимальной мощности обычно используется в фотоэлектрический системы.
По уравнению для электроэнергия:

куда:
- Vо это выходное напряжение
- яо выходной ток
- η - энергоэффективность (от 0 до 1)
- Vя входное напряжение
- яя входной ток
К Закон Ома:

куда:
- Zо это выход сопротивление
- Zя входной импеданс
Подставляя эти выражения вместо Iо и яя в уравнение мощности дает:

Как было показано ранее для непрерывный режим, (где яL > 0):
куда:
- D это рабочий цикл
Подставляя это уравнение для Vо в предыдущее уравнение дает:

что сводится к:

и наконец:

Это показывает, что можно регулировать коэффициент импеданса, регулируя рабочий цикл. Это особенно полезно в приложениях, где импедансы динамически меняются.
Заявление

Понижающий уровень широко используется в небольшой электронике с низким энергопотреблением для понижения напряжения с 24 / 12В до 5В. Они продаются в виде небольших микросхем готовой продукции по цене менее 1 доллара США с эффективностью около 95%.
Смотрите также
- Повышающий преобразователь
- Пониженно-повышающий преобразователь
- Конвертер Ćuk
- Топология Split-pi
- Общий DC-DC преобразователи и Импульсные источники питания
Рекомендации
- ^ Маммано, Роберт. «Переключение режима напряжения топологии источника питания в зависимости от текущего режима». Электронный журнал - Южноафриканский институт инженеров-электриков 18.6 (2001): 25-27.
- ^ «Архивная копия». Архивировано из оригинал 23 сентября 2016 г.. Получено 11 июля 2016.CS1 maint: заархивированная копия как заголовок (связь)
- ^ «Индукторный детектор перехода через нуль и детектор границы CCM / DCM для интегрированных сильноточных импульсных преобразователей постоянного тока в постоянный».
- ^ «Детектор границы CCM / DCM во временной области с нулевым статическим энергопотреблением».
- ^ "Список данных Power MOSFET". www.magnachip.com. MagnaChip. Получено 25 января 2015.
- ^ Джим Уильямс (1 января 2009 г.). «Отказы в коммутационных регуляторах, вызванные временем включения диодов».
- ^ "Таблица данных NCP5911" (PDF). www.onsemi.com. ON Semiconductor. Получено 25 января 2015.
- ^ Ги Сегье, Électronique de puissance, 7-е издание, Dunod, Paris 1999 (на французском языке)
- ^ «Анализ энергопотребления в режиме ожидания / пиковой мощности - Разгон Core i7: мощность против производительности». tomshardware.com. 13 апреля 2009 г.
- ^ "iitb.ac.in - Бак-конвертер" (PDF). Архивировано из оригинал (PDF) 16 июля 2011 г. 090424 ee.iitb.ac.in
- П. Хулиан, А. Олива, П. Мандолези и Х. Чиаккиарини, «Управление выходом с дискретной обратной связью понижающего преобразователя постоянного тока в постоянный», в материалах Международного симпозиума IEEE по промышленной электронике (ISIE'97), Гимарайнш, Португалия , 7-11 июля 1997 г., стр. 925–930.
- Х. Чаккиарини, П. Мандолези, А. Олива и П. Хулиан, «Нелинейный аналоговый контроллер для понижающего преобразователя: теория и экспериментальные результаты», Труды Международного симпозиума IEEE по промышленной электронике (ISIE'99), Блед, Словения , 12–16 июля 1999 г., стр. 601–606.
- MB D'Amico, A. Oliva, EE Paolini y N. Guerin, "Бифуркационное управление понижающим преобразователем в режиме прерывистой проводимости", Труды 1-й конференции IFAC по анализу и управлению хаотическими системами (CHAOS'06), стр. 399–404, Реймс (Франция), 28 al 30 de junio de 2006.
- Олива, А.Р., Х. Чаккиарини и Г. Бортолотто «Разработка контроллера с обратной связью по состоянию для синхронного понижающего преобразователя», Прикладные исследования Латинской Америки, Том 35, № 2, Абрил 2005 г., стр. 83–88. ISSN 0327-0793.
- Д’Амико, М. Б., Герен, Н., Олива, А. Р., Паолини, Э. Э. Динамика конвертера конвертера с цифровым управлением PI. Revista Iberoamericana de automática e informática industrial (RIAI), Том 4, № 3, июль 2007 г., стр. 126–131. ISSN 1697-7912.
- Chierchie, F. Paolini, E.E. Моделирование в дискретном времени и управление синхронным понижающим преобразователем. Аргентинская школа микронаноэлектроники, технологий и приложений, 2009. EAMTA 2009. 1–2 октября 2009 г., стр. 5–10. ISBN 978-1-4244-4835-7 .
внешняя ссылка
- https://www.ipes.ethz.ch/mod/lesson/view.php?id=2 Интерактивный семинар по силовой электронике (iPES)] Многие Java-апплеты демонстрируют работу преобразователей.
- Управление цифровым понижающим преобразователем на основе модели Описание и работа VisSim схема исходного кода для недорогого цифрового управления понижающими преобразователями постоянного тока
- SPICE-моделирование понижающего преобразователя
- Учебное пособие по импульсному источнику питания - Подробная статья о преобразователях постоянного тока в постоянный, которая дает более формальный и подробный анализ понижающего напряжения, включая эффекты неидеального переключения (нообратите внимание, что схема повышающего преобразователя не учитывает инверсию полярности напряжения между входом и выходом).
- Пример использования преобразователя постоянного тока в постоянный
- Об оптимизации энергоэффективности
- Многофазный преобразователь постоянного тока в постоянный