Динамика полета (самолет) - Flight dynamics (fixed-wing aircraft)
Эта статья ведущий раздел не может адекватно подвести итог его содержание. (Июль 2018 г.) |

Динамика полета это наука о воздуха ориентация и управление автомобилем в трех измерениях. Три критических параметра динамики полета: углы поворота через три размеры об автомобиле центр гравитации (cg), известный как подача, рулон и рыскание.
Системы управления отрегулируйте ориентацию автомобиля относительно его cg. Система управления включает в себя поверхности управления, которые при отклонении создают момент (или пару от элеронов) вокруг ЦТ, который вращает самолет по тангажу, крену и рысканью. Например, момент качки возникает из-за силы, приложенной на расстоянии вперед или назад от центра тяжести, заставляя самолет наклоняться вверх или вниз.
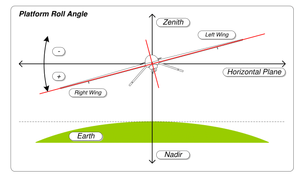
Крен, тангаж и рыскание относятся к вращению вокруг соответствующих осей, начиная с определенного устойчивый полет состояние равновесия. Угол равновесного крена известен как уровень крыльев или нулевой угол крена.
Наиболее распространенное авиационное соглашение определяет крен как движение относительно продольной оси, положительное при опущенном правом (правом) крыле. Рыскание относительно вертикальной оси корпуса положительно, носом вправо. Шаг вокруг оси, перпендикулярной продольной плоскости симметрии, положительным носом вверх.[1]
А самолет увеличивает или уменьшает подъемную силу, создаваемую крыльями, когда он поднимает или опускает нос, увеличивая или уменьшая угол атаки (АОА). Угол крена также известен как угол крена на самолете с неподвижным крылом, который обычно «крен», чтобы изменить горизонтальное направление полета. Самолет обтекается от носа до хвоста, чтобы уменьшить тащить делает выгодным сохранение угол скольжения близко к нулю, хотя самолет может быть намеренно "смещен в сторону", чтобы увеличить сопротивление и скорость снижения во время посадки, чтобы сохранить курс самолета таким же, как курс взлетно-посадочной полосы, при посадке при боковом ветре и во время полета с асимметричной мощностью.[2]





Вступление
Справочные кадры
Три правша, Декартовы системы координат вижу частое использование в динамике полета. Первая система координат имеет начало координат, зафиксированное в системе отсчета Земли:
- Земляной каркас
Во многих приложениях динамики полета предполагается, что земная рамка является инерциальной с плоской ИксE,уE-плоскость, хотя земной каркас тоже можно считать сферическая система координат с началом в центре Земли.
Две другие системы отсчета закреплены на теле, их исходные точки перемещаются вместе с летательным аппаратом, обычно в центре тяжести. Для самолета, симметричного справа налево, кадры могут быть определены как:
- Каркас кузова
- Начало координат - центр тяжести самолета
- Иксб ось - положительный выход из носовой части самолета в плоскости симметрии самолета
- zб ось - перпендикулярно оси Иксб ось, в плоскости симметрии ЛА, положительная ниже ЛА
- уб ось - перпендикулярно оси Иксб,zб-плоскость, положительная, определяемая правило правой руки (как правило, положительно от правого крыла)
- Рамка ветра
- Начало координат - центр тяжести самолета
- Иксш ось - положительная по направлению вектора скорости ЛА относительно воздуха
- zш ось - перпендикулярно оси Иксш ось, в плоскости симметрии ЛА, положительная ниже ЛА
- уш ось - перпендикулярно оси Иксш,zш-плоскость, положительная, определяемая по правилу правой руки (как правило, положительная вправо)
Асимметричные самолеты имеют аналогичные фиксированные рамы, но для выбора точных направлений движения необходимо использовать другие соглашения. Икс и z топоры.
Каркас Земли - удобный кадр для выражения поступательной и вращательной кинематики самолета. Кадр Земли также полезен тем, что при определенных предположениях он может быть аппроксимирован инерционным. Кроме того, одна сила, действующая на самолет, - вес - фиксируется в +zE направление.
Рама кузова часто представляет интерес, потому что начало координат и оси остаются фиксированными относительно самолета. Это означает, что относительная ориентация кадров Земли и тела описывает положение самолета. Кроме того, направление силы тяги обычно фиксируется в раме корпуса, хотя некоторые летательные аппараты могут изменять это направление, например, на вектор тяги.
Рамка ветра - это удобная рамка для выражения аэродинамических сил и моментов, действующих на самолет. В частности, сеть аэродинамическая сила можно разделить на составляющие по осям ветровой рамы, при этом сила сопротивления в -Иксш направление и подъемная сила в -zш направление.

В дополнение к определению опорных кадров может быть определена относительная ориентация опорных кадров. Относительная ориентация может быть выражена в различных формах, включая:
Различные углы Эйлера, связывающие три системы отсчета, важны для динамики полета. Существует много соглашений об углах Эйлера, но все последовательности вращения, представленные ниже, используют z-y'-x " соглашение. Это соглашение соответствует типу Углы Тейта-Брайана, которые принято называть углами Эйлера. Это соглашение подробно описывается ниже для углов Эйлера крена, тангажа и рыскания, которые описывают ориентацию корпуса относительно земного кадра. Остальные наборы углов Эйлера описаны ниже по аналогии.
Для преобразования из земной рамы в раму тела с использованием углов Эйлера следующие повороты выполняются в заданном порядке. Сначала поверните оси земной рамы. ИксE и уE вокруг zE ось по углу рыскания ψ. Это приводит к промежуточной системе отсчета с осями, обозначенными Икс', y', z', куда z '= zE. Во-вторых, поверните Икс' и z' топоры вокруг у' ось по углу тангажа θ. Это приводит к другой промежуточной системе отсчета с осями, обозначенными x ", y", z ", куда y "= y'. Наконец, поверните y " и z " топоры вокруг Икс" ось по углу крена φ. Опорная рамка, которая получается после трех вращений, - это рамка тела.
Основываясь на приведенных выше соглашениях о вращениях и осях, угол рыскания ψ - угол между севером и проекцией продольной оси самолета на горизонтальную плоскость, угол тангажа θ - угол между продольной осью самолета и горизонталью, а угол крена φ представляет собой вращение вокруг продольной оси самолета после поворота по рысканью и тангажу.
Для преобразования из системы координат Земли в систему координат ветра три угла Эйлера представляют собой угол крена. μ, угол траектории полета γ, а угол курса σ. При выполнении поворотов, описанных выше для получения кадра ветра из кадра Земли, (μ,γ,σ) аналогичны (φ,θ,ψ), соответственно. Курсирующий угол σ - угол между севером и горизонтальной составляющей вектора скорости, который описывает, в каком направлении летательный аппарат движется относительно сторон света. Угол траектории полета γ - угол между горизонталью и вектором скорости, который описывает, набирает ли самолет или спускается. Угол крена μ представляет собой вращение подъемной силы вокруг вектора скорости, что может указывать на то, находится ли самолет в превращение.
Чтобы преобразовать рамку ветра в рамку тела, два угла Эйлера являются угол атаки α и угол скольжения β. При выполнении вращений, описанных ранее для получения рамы корпуса из ветровой рамы, (α,β) аналогичны (θ,ψ), соответственно; угол, аналогичный φ в этом преобразовании всегда равен нулю. Угол скольжения β - угол между вектором скорости и проекцией продольной оси ЛА на Иксш,уш-плоскость, которая описывает наличие боковой составляющей скорости самолета, также известной как боковое скольжение. Угол атаки α угол между Иксш,уш-плоскость и продольная ось самолета и, среди прочего, является важной переменной при определении величины подъемной силы.
Дизайнерские кейсы
При анализе устойчивости самолета обычно рассматривают возмущения относительно номинального значения. устойчивый полет штат. Таким образом, анализ будет применяться, например, при условии:
- Прямой и горизонтальный полет
- Поверните с постоянной скоростью
- Подход и посадка
- Взлететь
Скорость, высота и угол дифферента атаки различны для каждого условия полета, кроме того, самолет будет по-разному настроен, например на низкой скорости закрылки могут быть развернуты и ходовая часть может быть внизу.
Кроме асимметричный дизайн (или же симметричные конструкции при значительном боковом скольжении) продольные уравнения движения (включая тангаж и подъемную силу) могут рассматриваться независимо от поперечного движения (включая крен и рыскание).
Ниже рассматриваются возмущения относительно номинальной прямой и горизонтальной траектории полета.
Для упрощения анализа (относительно) предполагается, что управляющие поверхности фиксируются на протяжении всего движения, это устойчивость с фиксацией ручки. Анализ без прихватов требует дальнейшего усложнения учета движения рулевых поверхностей.
Кроме того, предполагается, что полет происходит в неподвижном воздухе, и самолет рассматривается как жесткое тело.
Силы бегства
На самолет в полете действуют три силы: масса, толкать, а аэродинамическая сила.
Аэродинамическая сила
Составляющие аэродинамической силы
Выражение для расчета аэродинамической силы:

куда:
- Разница между статическим давлением и свободным текущим давлением
- вектор внешней нормали элемента площади
- вектор касательного напряжения, практикуемый воздухом на теле
- адекватная опорная поверхность




в проекции на оси ветра получаем:

куда:
- Тащить
- Боковое усилие
- Поднимать



Аэродинамические коэффициенты
Динамическое давление свободного тока

Правильная ссылка поверхность (крыло поверхность, в случае самолеты )



![Equiv C_ {d} = { dfrac {D} {qS}} = - { dfrac {1} {S}} int _ { Sigma} [(- C_ {p}) { mathbf {n} } bullet { mathbf {i_ {w}}} + C_ {f} { mathbf {t}} bullet { mathbf {i_ {w}}}] , d sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/b16598ab4310bdfb79e62c3b3ffa8fb3d7356bea)
Коэффициент поперечной силы
![Equiv C_ {Q} = { dfrac {Q} {qS}} = - { dfrac {1} {S}} int _ { Sigma} [(- C_ {p}) { mathbf {n} } bullet { mathbf {j_ {w}}} + C_ {f} { mathbf {t}} bullet { mathbf {j_ {w}}}] , d sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/058ae7bf706024c1943fc8d36eb6ca9a35653039)
![Equiv C_ {L} = { dfrac {L} {qS}} = - { dfrac {1} {S}} int _ { Sigma} [(- C_ {p}) { mathbf {n} } bullet { mathbf {k_ {w}}} + C_ {f} { mathbf {t}} bullet { mathbf {k_ {w}}}] , d sigma](https://wikimedia.org/api/rest_v1/media/math/render/svg/a92e802e0eb8cad0e69f7849d35e2b6dbec96a1b)
Необходимо знать Cп и Cж в каждой точке рассматриваемой поверхности.
Безразмерные параметры и аэродинамические режимы
При отсутствии тепловых эффектов есть три замечательных безразмерных числа:
- Сжимаемость потока:

- Вязкость потока:

- Редкость потока:

куда:
- скорость звук
- коэффициент удельной теплоемкости
- газовая постоянная массовым единством
- абсолютный температура
- длина свободного пробега
- скорость звук





Согласно λ существует три возможных степени разрежения и соответствующие им движения называются:
- Континуальный ток (разрежение незначительное):
- Переходный ток (умеренное разрежение):
- Свободный молекулярный ток (высокое разрежение):



В динамике полета движение тела в потоке рассматривается как непрерывный ток. Во внешнем слое пространства, окружающего тело вязкость будет незначительным. Однако влияние вязкости необходимо будет учитывать при анализе потока в непосредственной близости от пограничный слой.
В зависимости от сжимаемости потока можно рассматривать разные виды токов:
- Несжимаемый дозвуковой ток:
- Сжимаемый дозвуковой ток:
- Трансзвуковой ток:
- Сверхзвуковой ток:
- Гиперзвуковое течение:





Уравнение коэффициента лобового сопротивления и аэродинамическая эффективность
Если геометрия тела фиксирована и в случае симметричного полета (β = 0 и Q = 0), коэффициенты давления и трения являются функциями, зависящими от:


куда:
- угол атаки
- рассматриваемая точка поверхности


В этих условиях тащить и коэффициент подъема являются функциями, зависящими исключительно от угол атаки тела и Мах и Числа Рейнольдса. Аэродинамическая эффективность, определяемая как соотношение между коэффициентами подъемной силы и сопротивления, также будет зависеть от этих параметров.

Также возможно получить зависимость коэффициент трения уважение к коэффициент подъема. Это соотношение известно как уравнение коэффициента сопротивления:
- уравнение коэффициента сопротивления

Аэродинамический КПД имеет максимальное значение EМаксимум, относительно CL где касательная линия от начала координат касается графика уравнения коэффициента сопротивления.
Коэффициент лобового сопротивления, CD, можно разложить двумя способами. Первое типичное разложение разделяет эффекты давления и трения:

Есть второе типичное разложение с учетом определения уравнения коэффициента сопротивления. Это разложение отделяет эффект от коэффициент подъема в уравнении, получая два члена CD0 и CДи. CD0 известен как коэффициент паразитного сопротивления и представляет собой базовый коэффициент осадки при нулевой подъемной силе. CДи известен как коэффициент индуцированного сопротивления и создается подъемной силой тела.

Параболический и общий коэффициент сопротивления
Хорошей попыткой определения коэффициента индуцированного сопротивления является предположение о параболической зависимости подъемной силы.

Аэродинамическая эффективность теперь рассчитывается как:

Если конфигурация плоскости симметрична относительно плоскости XY, минимальный коэффициент сопротивления равен паразитному сопротивлению плоскости.

Однако в случае, если конфигурация асимметрична относительно плоскости XY, флаг минимума отличается от паразитного сопротивления. В этих случаях можно проследить новое приближенное уравнение параболического сопротивления, оставив минимальное значение сопротивления при нулевом значении подъемной силы.


Вариация параметров с числом Маха
В Коэффициент давления варьируется в зависимости от число Маха по соотношению, приведенному ниже:[4]

куда
- Cп сжимаемый коэффициент давления
- Cp0 это несжимаемый коэффициент давления
- M∞ - число Маха набегающего потока.
Это соотношение достаточно точное для 0,3
Аэродинамическая сила в заданной атмосфере
видеть Аэродинамическая сила
Статическая стабильность и контроль
Продольная статическая устойчивость
видеть Продольная статическая устойчивость
Направленная устойчивость
Направленная устойчивость или устойчивость флюгера зависит от статическая устойчивость самолета вокруг оси z. Так же, как и в случае продольной устойчивости, желательно, чтобы летательный аппарат имел тенденцию возвращаться в состояние равновесия, когда он подвергается некоторой форме нарушения рыскания. Для этого наклон кривой момента рыскания должен быть положительным. Самолет, обладающий этим режимом устойчивости, всегда будет указывать в сторону относительного ветра, отсюда и название устойчивости флюгера.
Динамическая устойчивость и управляемость
Продольные моды
Обычной практикой является получение четвертого порядка характеристическое уравнение чтобы описать продольное движение, а затем разложить его приблизительно на высокочастотную моду и низкочастотную моду. Подход, принятый здесь, основан на использовании качественных данных о поведении воздушного судна для упрощения уравнений с самого начала и достижения результата с помощью более доступного маршрута.
Два продольных движения (моды) называются короткий период колебания шага (SPPO), а фугоид.
Короткопериодические колебания высоты звука
Короткий ввод (в Системы управления терминология импульс ) по тангажу (обычно через руль высоты в самолетах стандартной конфигурации с неподвижным крылом), как правило, приводит к отклонениям от дифферента. Переход характеризуется затухающим простые гармонические колебания по поводу новой отделки салона. Траектория очень мало изменяется за время, необходимое для затухания колебаний.
Обычно это колебание имеет высокую частоту (следовательно, короткий период) и затухает в течение нескольких секунд. Пример из реальной жизни: пилот выбирает новое положение для набора высоты, например, нос на 5 ° вверх от исходного положения. Можно использовать короткое резкое оттягивание рулевой колонки назад, что обычно приводит к колебаниям относительно нового состояния дифферента. Если колебания слабо демпфируются, дрону потребуется много времени, чтобы прийти в новое состояние, что может привести к Колебания, вызванные пилотом. Если режим короткого периода является нестабильным, пилот, как правило, не может безопасно управлять летательным аппаратом в течение любого периода времени.
Этот затухающий гармоническое движение называется короткий период колебание тангажа, оно возникает из-за стремления устойчивого самолета указывать в общем направлении полета. По своей природе он очень похож на флюгер режим ракетных или ракетных конфигураций. Движение в основном связано с настройкой высоты (тета) и заболеваемость (альфа). Направление вектора скорости относительно инерциальных осей равно . Вектор скорости: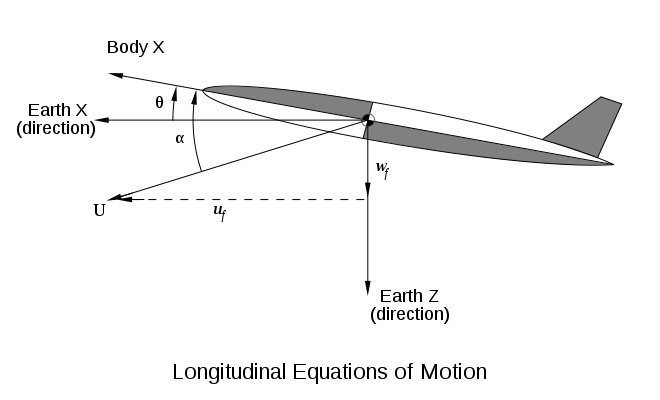





куда , - компоненты скорости по инерционным осям. В соответствии с Второй закон Ньютона, то ускорения пропорциональны силы, поэтому силы по инерционным осям равны:




куда м это масса.По характеру движения изменение скорости пренебрежимо мала в течение периода колебаний, поэтому:



Но силы создаются давление распределения на теле и относятся к вектору скорости. Но набор осей скорости (ветра) не является инерционный кадр, поэтому мы должны преобразовать силы фиксированных осей в оси ветра. Кроме того, нас интересует только сила вдоль оси z:

Или же:

На словах сила оси ветра равна центростремительный ускорение.
Уравнение момента - это производная по времени от угловой момент:

где M - момент тангажа, а B - момент инерции относительно оси тангажа. Таким образом, уравнения движения со всеми силами и моментами, относящимися к осям ветра, имеют следующий вид:



Нас интересуют только возмущения сил и моментов из-за возмущений в состояниях и q, и их производные по времени. Они характеризуются производные стабильности определяется из условий полета. Возможные производные устойчивости:
- Подъем из-за падения, это отрицательно, потому что ось z направлена вниз, в то время как положительное падение вызывает силу, направленную вверх.

- Подъем, обусловленный скоростью тангажа, возникает из-за увеличения угла падения хвоста, следовательно, также отрицательный, но небольшой по сравнению с .

- Питчинг момент из-за падения - термин статической устойчивости. Статическая стабильность требует, чтобы это было отрицательным.

- Момент тангажа из-за шага - член демпфирования шага, он всегда отрицательный.

Так как хвост работает в поле потока крыла, изменения угла наклона крыла вызывают изменения потока вниз, но существует задержка для изменения поля потока крыла, чтобы повлиять на подъемную силу, это представлено как момент, пропорциональный скорости изменения заболеваемости:

Эффект отсроченной промывки вниз увеличивает подъем хвостовой части и создает момент опускания носа, поэтому ожидается отрицательный.
Уравнения движения с малыми силами и моментами возмущения становятся:


Этим можно манипулировать, чтобы получить линейную форму второго порядка. дифференциальное уравнение в :

Это представляет собой затухающий простые гармонические колебания.
Мы должны ожидать быть малым по сравнению с единицей, поэтому коэффициент при (термин «жесткость») будет положительным, если . В этом выражении преобладают , что определяет продольная статическая устойчивость самолета, он должен быть отрицательным для устойчивости. Срок демпфирования уменьшается из-за эффекта смыва вниз, и сложно спроектировать самолет с быстрой естественной реакцией и сильным демпфированием. Обычно отклик слабозатухающий, но стабильный.


Фугоид
Если ручка зафиксирована, дрон не будет поддерживать прямой и горизонтальный полет (за исключением маловероятного случая, когда он окажется идеально сбалансированным для горизонтального полета при текущей настройке высоты и тяги), но начнет пикировать, выравниваться и снова подняться. Он будет повторять этот цикл, пока не вмешается пилот. Это длительное колебание скорости и высоты называется фугоид режим. Это анализируется в предположении, что ССПО выполняет свои функции и поддерживает угол атаки близкий к номинальному. Два состояния, которые в основном затрагиваются, - это угол траектории полета. (гамма) и скорость. Уравнения движения малых возмущений:


что означает, что центростремительная сила равна возмущению подъемной силы.
Для скорости, разрешающей по траектории:

где g - это ускорение свободного падения у поверхности земли. Ускорение по траектории равно чистой силе по оси x минус компонент веса. Не следует ожидать, что существенные аэродинамические производные будут зависеть от угла траектории полета, поэтому только и нужно учитывать. - приращение сопротивления при увеличении скорости, оно отрицательное, также - это приращение подъемной силы из-за приращения скорости, оно также отрицательно, поскольку подъемная сила действует в противоположном смысле по отношению к оси z.


Уравнения движения становятся:


Они могут быть выражены в виде уравнения второго порядка по углу траектории полета или возмущению скорости:

Теперь подъемная сила почти равна весу:

куда это плотность воздуха, - площадь крыла, W - вес и - коэффициент подъемной силы (предполагается постоянным, поскольку угол падения постоянен), мы имеем, приблизительно:




Период фугоида T получается из коэффициента при u:

Или же:

Поскольку подъемная сила намного больше сопротивления, фугоид в лучшем случае слегка демпфируется. А пропеллер с фиксированной скоростью поможет. Сильное демпфирование вращения по тангажу или большой инерция вращения увеличить связь между короткопериодными и фугоидными модами, так что они будут модифицировать фугоид.
Боковые режимы
С симметричной ракетой или ракетой курсовая устойчивость по рысканью такая же, как и по тангажу; он напоминает короткопериодные колебания тангажа с плоскостью рыскания, эквивалентной производным устойчивости тангажа. По этой причине курсовая устойчивость по тангажу и рысканью вместе известна как устойчивость ракеты "флюгером".
Самолету не хватает симметрии между тангажом и рысканием, поэтому путевая устойчивость при рысканье определяется другим набором производных устойчивости. Плоскость рыскания, эквивалентная короткопериодным колебаниям тангажа, который описывает курсовую устойчивость плоскости рыскания, называется голландским креном. В отличие от движений в плоскости тангажа, боковые режимы включают как крен, так и рыскание.
Голландский ролл
Принято выводить уравнения движения путем формальных манипуляций, что для инженера представляет собой математическую ловкость рук. Текущий подход следует за анализом плоскости шага при формулировании уравнений в терминах достаточно знакомых концепций.
Применение импульса через педали руля направления должно вызвать Голландский ролл, который представляет собой колебание по крену и рысканью с отставанием от рыскания по крену на четверть цикла, так что законцовки крыла следуют по эллиптическим траекториям относительно самолета.
Уравнение поступательного движения в плоскости рыскания, как и в плоскости тангажа, приравнивает центростремительное ускорение к боковой силе.

куда (бета) - это угол скольжения, Y - боковая сила, r - скорость рыскания.

Уравнения моментов немного сложнее. Условие дифферента - это когда самолет находится под углом атаки по отношению к воздушному потоку. Ось x тела не совпадает с вектором скорости, который является опорным направлением для осей ветра. Другими словами, топоры ветра не главные оси (масса не распределена симметрично относительно осей рыскания и крена). Рассмотрим движение элемента массы в позиции -z, x в направлении оси y, то есть в плоскости бумаги.

Если скорость вращения равна p, скорость частицы равна:

Слагаемая из двух членов, сила, действующая на эту частицу, во-первых, пропорциональна скорости изменения v, а вторая - из-за изменения направления этой составляющей скорости при движении тела. Последние члены приводят к перекрестным произведениям малых количеств (pq, pr, qr), которые позже отбрасываются. В данном анализе они с самого начала отброшены для ясности. Фактически, мы предполагаем, что направление скорости частицы из-за одновременных скоростей крена и рыскания существенно не меняется на протяжении всего движения. При таком упрощающем предположении ускорение частицы становится равным:

Момент рыскания определяется по формуле:

Существует дополнительный момент рыскания из-за смещения частицы в направлении y:

Момент рыскания определяется суммированием всех частиц тела:

где N - момент рыскания, E - произведение инерции, а C - момент инерции относительно ось рыскания Аналогичное рассуждение приводит к уравнению крена:

где L - момент качения, A - момент инерции качения.
Производные поперечной и продольной устойчивости
Состояния (боковое скольжение), r (скорость рыскания) и p (скорость крена), с моментами N (рыскание) и L (крен) и силой Y (вбок). Есть девять производных устойчивости, относящихся к этому движению, ниже объясняется, как они возникают. Однако лучшее интуитивное понимание можно получить, просто играя с моделью самолета и рассматривая, как силы, действующие на каждый компонент, зависят от изменения бокового скольжения и угловой скорости:
- Боковое усилие из-за бокового скольжения (при отсутствии рыскания).

Боковое скольжение создает боковую силу от киля и фюзеляжа. Кроме того, если крыло имеет двугранную форму, боковое скольжение при положительном угле крена увеличивает угол падения на правое крыло и уменьшает его на левом борту, в результате чего результирующая составляющая силы прямо противоположна направлению бокового скольжения. Стреловидность крыльев назад оказывает такое же влияние на угол падения, но поскольку крылья не наклонены в вертикальной плоскости, только обратный замах не влияет . Тем не менее, угол наклона может использоваться с большими углами обратной стреловидности в самолетах с высокими характеристиками, чтобы компенсировать влияние бокового скольжения крыла. Как ни странно, это не меняет знака вклада конфигурации крыла в (по сравнению с двугранным случаем).
- Боковое усилие из-за скорости крена.

Скорость крена приводит к падению на плавник, что создает соответствующую боковую силу. Кроме того, положительный крен (правое крыло опущено) увеличивает подъемную силу на правом крыле и уменьшает ее на левом. Если крыло имеет двугранный угол, это приведет к тому, что боковая сила на мгновение будет противодействовать результирующей тенденции к боковому скольжению. Конфигурации углового крыла и / или стабилизатора могут привести к изменению знака боковой силы, если эффект плавника подавлен.
- Боковое усилие из-за рыскания.

При рыскании возникают боковые силы из-за падения на руль направления, киль и фюзеляж.
- Момент рыскания из-за силы скольжения.

Боковое скольжение при отсутствии руля направления приводит к падению на фюзеляж и оперение, создавая таким образом момент рыскания, которому противодействует только направленная жесткость, которая будет иметь тенденцию указывать нос самолета назад против ветра в условиях горизонтального полета. В условиях бокового скольжения при заданном угле крена будет иметь тенденцию направлять нос в сторону бокового скольжения даже без нажатия руля направления, вызывая полет по спирали вниз.
- Момент рыскания из-за скорости крена.

Скорость крена создает подъемную силу киля, вызывающую рыскание, а также по-разному изменяет подъемную силу на крыльях, таким образом влияя на вклад индуцированного сопротивления каждого крыла, вызывая (небольшой) вклад момента рыскания. Положительный бросок обычно вызывает положительный результат. значения, если оперение является угловым или ребро ниже оси крена. Составляющие поперечной силы, возникающие в результате двугранной или угловой разницы подъемной силы крыла, мало влияют на потому что ось крыла обычно близко совмещена с центром тяжести.
- Момент рыскания из-за скорости рыскания.

Ввод скорости рыскания при любом угле крена генерирует векторы силы руля направления, киля и фюзеляжа, которые определяют результирующий момент рыскания. Рыскание также увеличивает скорость внешнего крыла, одновременно замедляя внутреннее крыло, с соответствующими изменениями сопротивления, вызывающими (небольшой) противоположный момент рыскания. противостоит присущей направленной жесткости, которая имеет тенденцию указывать нос самолета назад против ветра и всегда соответствует знаку входной скорости рыскания.
- Момент качения из-за бокового скольжения.

Положительный угол бокового скольжения вызывает падение оперения, которое может вызывать положительный или отрицательный момент крена в зависимости от его конфигурации. При любом ненулевом угле бокового скольжения двугранные крылья вызывают крутящий момент, который стремится вернуть самолет в горизонтальное положение, как и крылья с обратной стреловидностью. В случае крыльев с большой стреловидностью результирующий момент качения может быть чрезмерным для всех требований устойчивости, и можно использовать угол наклона для компенсации эффекта момента качения, вызванного стреловидностью крыла.
- Момент качения из-за рыскания.

Рыскание увеличивает скорость внешнего крыла, одновременно уменьшая скорость внутреннего крыла, вызывая момент крена во внутреннюю сторону. Вклад ребра обычно поддерживает этот эффект качения внутрь, если только он не компенсируется угловым стабилизатором над осью крена (или двугранным под осью крена).
- Момент качения из-за скорости крена.

Крен создает противодействующие силы вращения как на правом, так и на левом крыле, а также создает такие силы на оперении. Эти противоположные эффекты момента качения должны преодолеваться входом элеронов, чтобы поддерживать скорость крена. Если валок остановлен под ненулевым углом крена, вверх момент качения, вызванный последующим боковым скольжением, должен вернуть летательный аппарат в горизонтальное положение, если, в свою очередь, не превышен вниз момент качения в результате рыскания, вызванного боковым скольжением. Продольную устойчивость можно обеспечить или улучшить за счет минимизации последнего эффекта.
Уравнения движения
С Голландский ролл это режим управления, аналогичный короткопериодным колебаниям шага, любое влияние, которое он может оказать на траекторию, можно игнорировать. Скорость тела р складывается из скорости изменения угла бокового скольжения и скорости поворота. Принимая последнее за ноль, предполагая, что не влияет на траекторию, с ограниченной целью изучения голландского броска:

Уравнения рыскания и крена с производными устойчивости становятся:
- (рыскание)

- (рулон)

Инерционный момент из-за ускорения крена считается малым по сравнению с аэродинамическими условиями, поэтому уравнения принимают следующий вид:


Это становится уравнением второго порядка, определяющим либо скорость крена, либо скольжение:

Уравнение для скорости крена идентично. Но угол крена, (фи) определяется по формуле:


Если п представляет собой затухающее простое гармоническое движение, поэтому , но рулон должен быть в квадратура со скоростью крена, а значит, и с боковым скольжением. Движение состоит из колебаний по крену и рысканью, при этом крен отстает на 90 градусов от рыскания. Концы крыльев очерчивают эллиптические траектории.
Стабильность требует "жесткость "и" демпфирующий "должны быть положительными. Это:
- (демпфирование)

- (жесткость)

В знаменателе преобладают , производная демпфирования крена, которая всегда отрицательна, поэтому знаменатели этих двух выражений будут положительными.
Учитывая термин «жесткость»: будет положительным, потому что всегда отрицательно и положительный по дизайну. обычно отрицательный, в то время как положительный. Чрезмерный двугранный угол может дестабилизировать крен голландского крена, поэтому конфигурации с сильно стреловидными крыльями требуют наличия углового угла для компенсации влияния стреловидности крыла на .

В параметре демпфирования преобладает произведение демпфирования крена и производных демпфирования рыскания, оба они отрицательны, поэтому их произведение положительно. Поэтому голландский ролл должен быть демпфированным.
Движение сопровождается небольшим боковым движением центра тяжести, и более «точный» анализ введет термины в Ввиду точности, с которой могут быть вычислены производные по устойчивости, это излишняя педантичность, которая скрывает связь между геометрией самолета и управляемостью, что является основной целью данной статьи.
Просадка рулона
Подергивание ручки в сторону и возвращение ее в центр вызывает чистое изменение ориентации рулона.
Креновое движение характеризуется отсутствием естественной устойчивости, отсутствуют производные по устойчивости, которые создают моменты в ответ на угол инерционного крена. Помеха крену вызывает скорость крена, которая отменяется только пилотом или автопилот вмешательство. Это происходит при незначительных изменениях скорости скольжения или рыскания, поэтому уравнение движения сводится к:

отрицательный, поэтому скорость крена со временем будет уменьшаться. Скорость крена снижается до нуля, но нет прямого контроля над углом крена.
Спиральный режим
Просто удерживая ручку неподвижно, при старте с крыльями почти на одном уровне самолет обычно имеет тенденцию постепенно отклоняться в сторону от прямой траектории полета. Это (немного нестабильный) спиральный режим.[нужна цитата ]
Траектория спирального режима
При изучении траектории интерес представляет скорее направление вектора скорости, чем направление тела. Направление вектора скорости при проецировании на горизонт будет называться дорожкой, обозначенной (му ). Ориентация тела называется заголовком, обозначается (фунт / кв. дюйм). В силовое уравнение движения входит весовая составляющая:[нужна цитата ]



куда грамм - ускорение свободного падения, а U это скорость.
Включая производные стабильности:

Ожидается, что скорость крена и рыскания будет небольшой, поэтому вклад и будут проигнорированы.
Скорость скольжения и крена меняется постепенно, поэтому их время производные игнорируются. Уравнения рыскания и крена сводятся к:
- (рыскание)

- (рулон)

Решение для и п:


Подстановка бокового скольжения и скорости крена в уравнение силы приводит к уравнению первого порядка для угла крена:

Это экспоненциальный рост или распад, в зависимости от того, коэффициент положительный или отрицательный. Знаменатель обычно отрицательный, что требует (оба продукта положительные). Это находится в прямом противоречии с голландскими требованиями к устойчивости по крену, и сложно спроектировать самолет, для которого и голландский режим крена, и спиральный режим по своей природе устойчивы.[нужна цитата ]

Поскольку спиральный режим имеет длительную постоянную времени, пилот может вмешаться, чтобы эффективно стабилизировать его, но самолету с нестабильным креном по голландской оси будет сложно летать. Обычно самолет проектируется со стабильным голландским режимом крена, но немного нестабильным спиральным режимом.[нужна цитата ]
Смотрите также
Рекомендации
Эта статья включает в себя список общих Рекомендации, но он остается в основном непроверенным, потому что ему не хватает соответствующих встроенные цитаты. (Февраль 2009 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
Примечания
- ^ Flightwise Том 2 - Стабильность и управление самолетом, Крис Карпентер, 1997, Эйрлайф Паблишинг Лтд., ISBN 1 85310 870 7, Рисунок 2.6
- ^ https://archive.org/details/DTIC_ADA124610 п.В-5
- ^ а б c «МИСБ Стандарт 0601» (PDF). Совет по стандартам видеосъемки (MISB). Получено 1 мая 2015. Также на Файл: MISB Standard 0601.pdf.
- ^ Андерсон, Джон Д. (2005). Введение в полет (5. изд., Междунар. Ред.). Бостон [u.a.]: Макгроу-Хилл. С. 274–275. ISBN 9780071238182.
Библиография
- Н. К. Синха и Н. Ананткришнан (2013), Элементарная динамика полета с введением в методы бифуркации и продолжения, CRC Press, Тейлор и Фрэнсис.
- Бабистер, А. В. (1980). Динамическая устойчивость и реакция самолета (1-е изд.). Оксфорд: Pergamon Press. ISBN 978-0080247687.
- Стенгель, Роберт Ф. (2004). Динамика полета. Принстон, штат Нью-Джерси: Princeton University Press. ISBN 0-691-11407-2.