Машина - Machine
Простые машины
Чтобы упростить задачу, используются простые машины, например, подъем тяжелого ящика.
Вот 6 типов простых машин:
Шесть типов простых машин
- Рычаг.
- Шкив.
- Колесо и ось.
- Винт.
- Наклонная плоскость.
- Клин.

А машина (или механическое устройство) это механическая конструкция который использует мощность применять силы и контроль движение для выполнения намеченного действия. Машины могут приводиться в движение животные и люди, природными силами, такими как ветер и воды, и по химический, тепловой, или электрические мощность, и включать систему механизмы которые формируют вход привода для достижения определенного приложения выходных сил и движения. Они также могут включать компьютеры и датчики, которые контролируют производительность и планируют движение, часто называемые механические системы.
Натурфилософы эпохи Возрождения выделили шесть простые машины которые были простейшими устройствами, которые приводили груз в движение, и рассчитывали отношение выходной силы к входной силе, известное сегодня как механическое преимущество.[1]
Современные машины - это сложные системы, состоящие из конструктивных элементов, механизмы и компоненты управления и включают интерфейсы для удобного использования. Примеры включают широкий спектр автомобили, такие как автомобили, лодки и самолеты, Техника в доме и офисе, включая компьютеры, здание обработка воздуха и системы водоснабжения, а также сельскохозяйственная техника, Станки и автоматизация производства системы и роботы.

Этимология
Английское слово машина проходит через Среднефранцузский от латинский машина,[2] что, в свою очередь, происходит от Греческий (дорический μαχανά махана, Ионный μηχανή механе "изобретение, машина, двигатель",[3] происхождение от μῆχος мехос "средство, целесообразное, средство правовой защиты"[4]).[5] Слово механический (Греческий: μηχανικός) происходит от тех же греческих корней. Более широкое значение слова «ткань, структура» встречается в классической латыни, но не в греческом. Это значение встречается во французском позднем средневековье и было заимствовано с французского на английский в середине 16 века.
В XVII веке слово «машина» могло также означать схему или сюжет, теперь это значение выражается производным обработка. Современное значение возникло из специализированного применения термина к сценические двигатели используется в театр и военным осадные машины, как в конце 16 - начале 17 вв. В OED прослеживает формальное, современное значение Джон Харрис ' Лексикон Техникум (1704), в котором есть:
- «Машина» или «Двигатель» в «Механиках» - это любая сила, обладающая достаточной Силой, чтобы поднять или остановить Движение тела. Простые машины обычно считаются шестью числами, а именно. Балансировка, рычаг, шкив, колесо, клин и винт. Составные машины или двигатели бесчисленны.
Слово двигатель используемый в качестве (почти) синонима как Харрисом, так и в более позднем языке происходит в конечном итоге (через старофранцузский) от латинского Ingenium «изобретательность, изобретение».
История

В ручной топор, сделанный путем скалывания кремня, чтобы сформировать клин в руках человека преобразует силу и движение инструмента в поперечные силы раскалывания и движения заготовки. Ручной топор - первый пример клин, старейший из шести классических простые машины, на котором базируется большинство машин. Второй старейшей простой машиной был наклонная плоскость (рампа),[6] который использовался с доисторический раз переместить тяжелые предметы.[7][8]
Остальные четыре простые машины были изобретены в древний Ближний Восток.[9] В рулевое колесо, вместе с колесо и ось механизм, был изобретен в Месопотамия (современный Ирак) в 5-м тысячелетии до нашей эры.[10] В рычаг механизм впервые появился около 5000 лет назад в Ближний Восток, где он использовался в простом шкала баланса,[11] и перемещать большие предметы в древнеегипетские технологии.[12] Рычаг также использовался в журавль водоподъемное устройство, первое кран машина, появившаяся в Месопотамии около 3000 г. до н.э.,[11] а затем в древнеегипетские технологии около 2000 г. до н.э.[13] Самое раннее свидетельство шкивы датируются Месопотамией в начале 2-го тысячелетия до нашей эры,[14] и древний Египет в течение Двенадцатая династия (1991-1802 гг. До н.э.).[15] В винт, последняя из простых изобретенных машин,[16] впервые появился в Месопотамии во время Нео-ассирийский период (911-609) до нашей эры.[17] В Египетские пирамиды были построены с использованием трех из шести простых машин, наклонной плоскости, клина и рычага, для создания таких конструкций, как Великая пирамида в Гизе.[18]
Три простые машины были изучены и описаны греческим философом. Архимед примерно в 3 веке до нашей эры: рычаг, шкив и винт.[19][20] Архимед открыл принцип механическое преимущество в рычаге.[21] Позже греческие философы определили классические пять простых машин (исключая наклонную плоскость) и смогли приблизительно вычислить их механическое преимущество.[1] Цапля Александрийская (ок. 10–75 нашей эры) в своей работе Механика перечисляет пять механизмов, которые могут «привести в движение груз»; рычаг, лебедка, шкив, клин и винт,[20] и описывает их изготовление и использование.[22] Однако понимание греков ограничивалось статика (баланс сил) и не включал динамика (компромисс между силой и расстоянием) или концепция Работа.
Самый ранний практический водный машины, водяное колесо и водяная мельница, впервые появился в Персидская империя, на территории нынешнего Ирака и Ирана, к началу 4 века до нашей эры.[23] Самый ранний практический ветряной машины, мельница и насос ветра, впервые появился в Мусульманский мир в течение Исламский золотой век, на территории нынешнего Ирана, Афганистана и Пакистана к 9 веку нашей эры.[24][25][26][27] Самый ранний практический на паровой тяге машина была паровой домкрат управляемый паровая турбина, описанный в 1551 г. Таки ад-Дин Мухаммад ибн Мааруф в Османский Египет.[28][29]
В хлопкоочистительный был изобретен в Индии в 6 веке нашей эры,[30] и прялка был изобретен в Исламский мир к началу 11 века,[31] оба из них были фундаментальными для роста хлопковая промышленность. Прялка также была предшественницей крутится Дженни, что было ключевым событием в начале Индустриальная революция в 18 веке.[32] В коленчатый вал и распредвал были изобретены Аль-Джазари в Северная Месопотамия около 1206 г.,[33][34][35] и позже они стали центральными в современном оборудовании, таком как паровой двигатель, двигатель внутреннего сгорания и автоматическое управление.[36]
Раннее программируемые машины были развиты в мусульманском мире. А музыкальный секвенсор, программируемый музыкальный инструмент, был самым ранним типом программируемой машины. Первый музыкальный секвенсор был автоматизированным флейта игрок изобретен Бану Муса братья, описанные в их Книга гениальных устройств, в 9 веке.[37][38] В 1206 году Аль-Джазари изобрел программируемый автоматы /роботы. Он описал четыре автомат музыканты, в том числе барабанщики, управляемые программируемым драм-машина, где их можно было заставить играть разные ритмы и разные барабанные партии.[39] В часы замка, а гидроэнергетический механический астрономические часы изобретенный Аль-Джазари, был первым программируемый аналоговый компьютер.[40][41][42]
В течение эпоха Возрождения, динамика Механические силы, как назывались простые машины, начали изучать с точки зрения того, сколько полезной работы они могут выполнять, что в конечном итоге привело к новой концепции механических Работа. В 1586 г. фламандский инженер Саймон Стевин получил механическое преимущество наклонной плоскости, и он был включен в другие простые машины. Полную динамическую теорию простых машин разработал итальянский ученый. Галилео Галилей в 1600 в Le Meccaniche («О механике»).[43][44] Он первым понял, что простые машины не создают энергия, они просто трансформируют его.[43]
Классические правила скольжения трение в машинах были обнаружены Леонардо да Винчи (1452–1519), но так и не опубликовал в его записных книжках. Они были заново открыты Гийом Амонтон (1699) и получили дальнейшее развитие Шарль-Огюстен де Кулон (1785).[45]
Джеймс Ватт запатентовал его параллельное движение в 1782 году, что сделало паровой двигатель двойного действия практичным.[46] В Бултон и Ватт паровой двигатель и более поздние конструкции приводятся в действие паровозы, пароходы, и фабрики.
В Индустриальная революция Это был период с 1750 по 1850 год, когда изменения в сельском хозяйстве, производстве, добыче полезных ископаемых, транспорте и технологиях оказали глубокое влияние на социальные, экономические и культурные условия того времени. Это началось в объединенное Королевство, а затем распространились по западная Европа, Северная Америка, Япония, и в конечном итоге остальной мир.
Начиная с конца 18 века, в Великобритании начался переход от ранее ручного труда и экономики, основанной на тягловом животноводстве, к машинному производству. Это началось с механизации текстильной промышленности, развития производство железа техники и более широкое использование рафинированный уголь.[47]
Простые машины
Идея о том, что машину можно разложить на простые подвижные элементы, привела Архимед определить рычаг, шкив и винт так как простые машины. Ко времени Возрождения этот список расширился и включил колесо и ось, клин и наклонная плоскость. Современный подход к характеристике машин фокусируется на компонентах, которые допускают движение, известных как суставы.
Клин (ручной топор): Возможно, первым примером устройства, предназначенного для управления питанием, является ручной топор, также называется бифас и Олоргесайли. Ручной топор изготавливается путем дробления камня, обычно кремня, для образования двустороннего края или клин. Клин - это простой станок, который преобразует поперечную силу и движение инструмента в поперечную силу раскола и движение заготовки. Доступная мощность ограничена усилием человека, использующего инструмент, но поскольку мощность является продуктом силы и движения, клин усиливает силу за счет уменьшения движения. Это усиление, или механическое преимущество это отношение скорости на входе к скорости на выходе. Для клина это определяется как 1 / tanα, где α - угол при вершине. Грани клина моделируются как прямые линии для образования скользящего или призматический шарнир.
Рычаг: В рычаг еще одно важное и простое устройство для управления питанием. Это тело, которое вращается на опоре. Поскольку скорость точки, находящейся дальше от оси поворота, больше, чем скорость точки рядом с ней, силы, приложенные далеко от оси поворота, усиливаются около точки поворота за счет связанного с этим уменьшения скорости. Если а - это расстояние от точки поворота до точки приложения входной силы и б расстояние до точки приложения выходной силы, тогда а / б это механическое преимущество рычага. Опора рычага моделируется шарнирной или шарнирной. революционный сустав.
Рулевое колесо: В рулевое колесо важная ранняя машина, такая как колесница. Колесо использует закон рычага, чтобы уменьшить силу, необходимую для преодоления трение при вытягивании груза. Чтобы увидеть это, обратите внимание, что трение, связанное с натягиванием груза на землю, примерно такое же, как трение в простом подшипнике, который поддерживает нагрузку на ось колеса. Однако колесо образует рычаг, который увеличивает тянущее усилие, преодолевая сопротивление трения в подшипнике.

Классификация простые машины предоставить стратегию проектирования новых машин была разработана Франц Рёло, который собрал и изучил более 800 элементарных машин.[49] Он признал, что классический простые машины могут быть разделены на рычаг, шкив, колесо и ось, которые образованы корпусом, вращающимся вокруг шарнира, и наклонной плоскостью, клином и винтом, которые аналогичным образом представляют собой блок, скользящий по плоской поверхности.[50]
Простые машины - это элементарные примеры кинематические цепи или связи которые используются для моделирования механические системы от паровой машины до роботов-манипуляторов. Подшипники, которые образуют точку опоры рычага и позволяют колесу, оси и шкивам вращаться, являются примерами кинематическая пара называется шарнирным соединением. Точно так же плоская поверхность наклонной плоскости и клин являются примерами кинематическая пара называется скользящим шарниром. Винт обычно обозначается как его собственная кинематическая пара, называемая спиральным шарниром.
Эта реализация показывает, что именно суставы или соединения, обеспечивающие движение, являются основными элементами машины. Начиная с четырех типов соединений, поворотного соединения, скользящего соединения, кулачкового соединения и зубчатого соединения, а также связанных соединений, таких как тросы и ремни, можно понять машину как сборку твердых частей, которые соединяют эти соединения, называемые механизм .[51]
Два рычага, или кривошипа, объединены в плоский четырехзвенная навеска путем присоединения звена, которое соединяет выход одного кривошипа с входом другого. Дополнительные ссылки могут быть прикреплены для формирования шестиступенчатая навеска или последовательно, чтобы сформировать робота.[51]
Механические системы

А механическая система управляет мощность для выполнения задачи, требующей сил и движения. Современные машины - это системы, состоящие из (i) источника питания и приводы которые создают силы и движение, (ii) a система механизмов которые формируют вход исполнительного механизма для достижения определенного приложения выходных сил и движения, (iii) контроллер с датчиками, которые сравнивают выходной сигнал с целевой производительностью, а затем направляют вход исполнительного механизма, и (iv) интерфейс для оператора, состоящий из рычагов , переключатели и дисплеи.
Это можно увидеть в паровой машине Ватта (см. Иллюстрацию), в которой мощность обеспечивается паром, расширяющимся для приведения в движение поршня. Шагающая балка, муфта и кривошип преобразуют линейное движение поршня во вращение выходного шкива. Наконец, вращение шкива приводит в действие регулятор с флайболом, который управляет клапаном подачи пара в поршневой цилиндр.
Прилагательное «механический» относится к навыкам в практическом применении искусства или науки, а также относится к движению, физическим силам, свойствам или агентам, с которыми имеет дело, или вызвано им. механика.[52] Аналогично словарь Merriam-Webster[53] определяет «механический» как относящийся к оборудованию или инструментам.
Поток энергии через машину позволяет понять работу различных устройств, от рычагов и зубчатых передач до автомобилей и роботизированных систем. Немец механик Франц Рёло[54] писал: «Машина представляет собой комбинацию устойчивых тел, устроенных таким образом, что с их помощью можно заставить механические силы природы совершать работу, сопровождаемую определенным определенным движением». Обратите внимание, что силы и движение объединяются, чтобы определить мощность.
Совсем недавно Uicker et al.[51] заявил, что машина - это «устройство для подачи энергии или изменения ее направления». Маккарти и Сох[55] описывать машину как систему, которая «обычно состоит из источника питания и механизм для контролируемого использования этой силы ".
Источники питания


Первоначальными источниками энергии для ранних машин были усилия человека и животных.
Водяное колесо: Водяные колеса появился во всем мире около 300 г. до н.э., чтобы использовать проточную воду для создания вращательного движения, которое применялось к фрезерование зерна, питание пиломатериалов, механическая обработка и текстильные операции. Современный водяные турбины использовать воду, протекающую через плотина вести электрический генератор.
Мельница: Рано ветряные мельницы захваченная энергия ветра для создания вращательного движения для фрезерных операций. Современный Ветряные турбины также приводит в движение генератор. Это электричество, в свою очередь, используется для привода моторы формирование исполнительных механизмов механических систем.
Двигатель: Слово «двигатель» происходит от «изобретательности» и первоначально относилось к устройствам, которые могут быть или не быть физическими устройствами. Увидеть Определение двигателя Мерриам-Вебстера. А паровой двигатель использует тепло для кипячения воды, содержащейся в сосуде под давлением; расширяющийся пар приводит в движение поршень или турбину. Этот принцип можно увидеть в эолипил Героя Александрии. Это называется двигатель внешнего сгорания.
An автомобиль двигатель называется двигатель внутреннего сгорания потому что он сжигает топливо ( экзотермический химическая реакция) внутри цилиндра и использует расширяющиеся газы для управления поршень. А реактивный двигатель использует турбину для сжатия воздуха, который сжигается вместе с топливом, так что он расширяется через сопло, обеспечивая тягу к самолет, а также «двигатель внутреннего сгорания». [56]
Электростанция: Тепло от сжигания угля и природного газа в котел генерирует пар, который приводит в движение паровая турбина повернуть электрический генератор. А атомная электростанция использует тепло от ядерного реактора для производства пара и электроэнергия. Эта мощность распределяется через сеть линий электропередачи для промышленного и индивидуального использования.
Двигатели: Электродвигатели использовать либо AC или ОКРУГ КОЛУМБИЯ электрический ток для создания вращательного движения. Электрический серводвигатели приводы для механических систем от робототехнические системы к современный самолет.
Сила жидкости: Гидравлический и пневматический системы используют электрический привод насосы для подачи воды или воздуха в цилиндры для питания линейное движение.
Механизмы
В механизм механической системы собирается из компонентов, называемых элементы машин. Эти элементы обеспечивают структуру системы и контролируют ее движение.
Конструктивными элементами обычно являются элементы рамы, подшипники, шлицы, пружины, уплотнения, застежки и обложки. Форма, текстура и цвет крышек обеспечивают стилизация и рабочий интерфейс между механической системой и ее пользователями.
Сборки, управляющие движением, также называются "механизмы."[54][57] Механизмы обычно классифицируются как шестерни и зубчатые передачи, который включает в себя ременные передачи и цепные приводы, кулачок и последователь механизмы и связи, хотя есть и другие специальные механизмы, такие как зажимные рычаги, механизмы индексации, спусковые механизмы и фрикционные устройства, такие как тормоза и клатчи.
Число степеней свободы механизма или его подвижность зависит от количества звеньев и шарниров, а также типов шарниров, используемых для создания механизма. Общая подвижность механизма - это разница между неограниченной свободой звеньев и количеством ограничений, накладываемых соединениями. Это описывается Критерий Чебышева-Грюблера-Куцбаха.
Шестерни и зубчатые передачи

Передачу вращения между контактирующими зубчатыми колесами можно проследить до Антикитерский механизм Греции и колесница, указывающая на юг Китая. Иллюстрации ученого эпохи Возрождения Георгиус Агрикола показать зубчатые передачи с цилиндрическими зубьями. Реализация эвольвентный зуб дали стандартную конструкцию шестерни, которая обеспечивает постоянное передаточное число. Некоторые важные особенности шестерен и зубчатых передач:
- Отношение делительных окружностей сопряженных шестерен определяет передаточное отношение и механическое преимущество комплекта передач.
- А планетарная передача обеспечивает высокий редуктор в компактном корпусе.
- Зубья шестерни можно проектировать для шестерен, которые некруглый, но по-прежнему плавно передает крутящий момент.
- Соотношения скоростей цепь и ременные передачи вычисляются так же, как и передаточные числа. Увидеть велосипедная передача.
Кулачковые и ведомые механизмы
А кулачок и последователь образуется в результате прямого контакта двух звеньев особой формы. Ведущее звено называется кулачком (см. Также кулачковый вал ), а звено, приводимое в движение за счет прямого контакта их поверхностей, называется ведомым. Форма контактирующих поверхностей кулачок и последователь определяет движение механизма.
Связи

А связь представляет собой набор ссылок, соединенных суставами. Как правило, звенья являются структурными элементами, а шарниры допускают движение. Возможно, самый полезный пример - планарный четырехзвенная навеска. Однако есть еще много специальных связей:
- Связь Ватта представляет собой четырехзвенную связь, образующую приблизительную прямую линию. Это было критически важно для работы его конструкции паровой машины. Эта связь также присутствует в подвеске транспортных средств, чтобы предотвратить поперечное перемещение кузова относительно колес. Также смотрите статью Параллельное движение.
- Успех связи Ватта привел к созданию аналогичных приближенных прямолинейных связей, таких как Связь Хукена и Чебышевская связь.
- В Звено Peaucellier генерирует истинно прямолинейный выходной сигнал от поворотного входа.
- В Связь Сарруса представляет собой пространственную связь, которая генерирует прямолинейное движение от вращательного входа. Выберите эту ссылку для анимации Связь Сарруса
- В Кланн связь и Связь Янсена - недавние изобретения, обеспечивающие интересные движения при ходьбе. Это соответственно шести- и восьмирычажная навеска.
Планарный механизм
Планарный механизм - это механическая система, которая ограничена таким образом, что траектории точек во всех телах системы лежат на плоскостях, параллельных плоскости земли. Оси вращения шарнирных соединений, соединяющих тела в системе, перпендикулярны этой плоскости заземления.
Сферический механизм
А сферический механизм представляет собой механическую систему, в которой тела движутся таким образом, что траектории точек в системе лежат на концентрических сферах. Оси вращения шарнирных соединений, соединяющих тела в системе, проходят через центр этих окружностей.
Пространственный механизм
А пространственный механизм представляет собой механическую систему, которая имеет по крайней мере одно тело, которое движется таким образом, что его точечные траектории представляют собой общие пространственные кривые. Оси вращения шарнирных соединений, соединяющих тела в системе, образуют в пространстве линии, которые не пересекаются и имеют различные общие нормали.
Механизмы изгиба
Механизм изгиба состоит из ряда жестких тел, соединенных эластичными элементами (также известными как изгибные соединения), которые предназначены для создания геометрически четко определенного движения при приложении силы.
Элементы машин
Элементарные механические компоненты машины называются элементы машин. Эти элементы состоят из трех основных типов (i) структурные компоненты такие как элементы рамы, подшипники, оси, шлицы, застежки, уплотнения и смазочные материалы, (ii) механизмы которые управляют движением различными способами, такими как зубчатые передачи, пояс или цепные приводы, связи, кулачок и последователь системы, в том числе тормоза и клатчи, и (iii) компоненты управления такие как кнопки, переключатели, индикаторы, датчики, исполнительные механизмы и компьютерные контроллеры.[58] Форма, текстура и цвет крышек, которые обычно не считаются элементом машины, являются важной частью машины, которая обеспечивает стилизация и рабочий интерфейс между механическими компонентами машины и ее пользователями.
Структурные компоненты
Ряд элементов машины обеспечивает важные структурные функции, такие как рама, подшипники, шлицы, пружина и уплотнения.
- Признание того, что рама механизма является важным элементом машины, изменило название. трехзвенная навеска в четырехзвенная навеска. Рамы обычно собираются из ферма или луч элементы.
- Подшипники компоненты, предназначенные для управления интерфейсом между движущимися элементами и являющиеся источником трение в машинах. Как правило, подшипники предназначены для чистого вращения или прямолинейное движение.
- Сплайны и ключи два способа надежно установить ось на колесо, шкив или шестерню, чтобы крутящий момент мог передаваться через соединение.
- Спрингс обеспечивает силы, которые могут удерживать компоненты машины на месте или действовать как подвеска для поддержки части машины.
- Уплотнения используются между сопряженными частями машины, чтобы жидкости, такие как вода, горячие газы или смазка, не протекали между сопрягаемыми поверхностями.
- Крепеж такие как винты, болты, пружинные зажимы и заклепки важны для сборки компонентов машины. Крепежные детали обычно считаются съемными. Напротив, методы соединения, такие как сварка, пайка, опрессовка и применение клеи, обычно требуется разрезать детали для разборки компонентов
Контроллеры
Контроллеры совмещают датчики, логика, и приводы для поддержания работоспособности компонентов машины. Возможно, самым известным является губернатор флайбола для паровой машины. Примеры этих устройств варьируются от термостат что при повышении температуры открывается клапан для охлаждающей воды к регуляторам скорости, таким как круиз-контроль система в автомобиле. В Программируемый логический контроллер заменил реле и специализированные механизмы управления на программируемый компьютер. Серводвигатели которые точно позиционируют вал в ответ на электрическую команду, - это приводы, которые робототехнические системы возможное.
Вычислительные машины

Чарльз Бэббидж разработал машины для табулирования логарифмов и других функций в 1837 году. Различный двигатель можно считать продвинутым механический калькулятор и его Аналитическая машина предшественник современного компьютер, хотя при жизни Бэббиджа ничего не было построено.
В Арифмометр и Комптометр механические компьютеры, которые являются предшественниками современные цифровые компьютеры. Модели, используемые для изучения современных компьютеров, называются Государственный аппарат и Машина Тьюринга.
Молекулярные машины
Биологическая молекула миозин реагирует на АТФ и АДФ, попеременно взаимодействуя с актиновой нитью и изменяя ее форму таким образом, чтобы проявлять силу, а затем расцепляется, чтобы восстановить свою форму или конформацию. Это действует как молекулярный двигатель, вызывающий сокращение мышц. Точно так же биологическая молекула кинезин имеет две секции, которые попеременно взаимодействуют и разъединяются с микротрубочками, заставляя молекулу перемещаться по микротрубочке и транспортировать везикулы внутри клетки, и динеин, который перемещает груз внутри клеток к ядру и вызывает биение аксонемы подвижные реснички и жгутики. «По сути, подвижная ресничка - это наномашина, состоящая из более чем 600 белков в молекулярных комплексах, многие из которых также функционируют независимо как наномашины. Гибкие линкеры позволить мобильные белковые домены связанных ими, чтобы привлечь их связывающих партнеров и вызвать дальнодействующие аллостерия через динамика домена белка. "[59] За производство энергии отвечают другие биологические машины, например АТФ-синтаза который использует энергию от градиенты протонов через мембраны приводить в движение турбиноподобное движение, используемое для синтеза АТФ, энергетическая валюта клетки.[60] Еще другие машины несут ответственность за экспрессия гена, в том числе ДНК-полимеразы для репликации ДНК,[нужна цитата ] РНК-полимеразы для производства мРНК,[нужна цитата ] то сплайсосома для удаления интроны, а рибосома для синтез белков. Эти машины и их наноразмерная динамика намного сложнее любых молекулярные машины которые еще были построены искусственно.[61] Эти молекулы все чаще считаются наномашины.[нужна цитата ]
Исследователи использовали ДНК для создания наноразмерных четырехзвенные связи.[62][63]
Влияние
Механизация и автоматизация

Механизация или механизация (БЫТЬ ) предоставляет операторам-людям оборудование, которое помогает им выполнять мускульные потребности при работе или замещает мышечную работу. В некоторых сферах механизация включает использование ручных инструментов. В современном использовании, например, в инженерии или экономике, механизация подразумевает более сложное оборудование, чем ручные инструменты, и не включает простые устройства, такие как мельница для лошадей или осла без редуктора. Устройства, которые вызывают изменение скорости или переход от возвратно-поступательного движения к вращательному, с использованием таких средств, как шестерни, шкивы или снопы и ремни, валы, кулачки и чудаки, обычно считаются машинами. После электрификации, когда большая часть мелкой техники перестала приводиться в действие вручную, механизация стала синонимом моторизованных машин.[64]
Автоматизация это использование Системы управления и информационные технологии снизить потребность в человеческом труде при производстве товаров и услуг. В рамках индустриализация, автоматизация - это шаг вперед механизация. В то время как механизация предоставляет операторам-людям оборудование, которое помогает им выполнять мышечные потребности работы, автоматизация также значительно снижает потребность в человеческих сенсорных и умственных потребностях. Автоматизация играет все более важную роль в мировая экономика и в повседневном опыте.
Автоматы
An автомат (множественное число: автоматы или автоматы) - это самодействующая машина. Это слово иногда используется для описания робот, а точнее автономный робот. А Игрушечный автомат был запатентован в 1863 году.[65]
Механика
Usher[66] сообщает, что Герой Александрии трактат о Механика сосредоточился на изучении подъема тяжестей. сегодня механика относится к математическому анализу сил и движения механической системы и состоит из исследования кинематика и динамика этих систем.
Динамика машин
В динамический анализ оборудования начинается с модели твердого тела для определения реакций в подшипниках, при этом учитываются эффекты упругости. В динамика твердого тела изучает движение систем взаимосвязанных тел под действием внешних сил. Предположение о том, что тела являются жесткими, что означает, что они не деформируются под действием приложенных сил, упрощает анализ за счет сведения параметров, описывающих конфигурацию системы, к перемещению и вращению систем отсчета, прикрепленных к каждому телу.[67][68]
Динамика системы твердого тела определяется ее уравнения движения, которые выводятся с помощью Законы движения Ньютона или Лагранжева механика. Решение этих уравнений движения определяет, как конфигурация системы твердых тел изменяется во времени. Постановка и решение динамики твердого тела является важным инструментом компьютерного моделирования механические системы.
Кинематика станков
Динамический анализ машины требует определения движения или кинематика, составляющих его частей, известный как кинематический анализ. Предположение о том, что система представляет собой сборку жестких компонентов, позволяет математически моделировать вращательное и поступательное движение как Евклидовы, или жесткие, преобразования. Это позволяет определять положение, скорость и ускорение всех точек в компоненте на основе этих свойств для контрольной точки и углового положения, угловая скорость и угловое ускорение компонента.
Дизайн машины
Дизайн машины относится к процедурам и методам, используемым для решения трех этапов жизненный цикл машины:
- изобретение, который включает в себя определение потребности, разработку требований, генерацию концепции, разработку прототипа, производство и верификационное тестирование;
- инженерия производительности включает в себя повышение эффективности производства, снижение требований к обслуживанию и ремонту, добавление функций и повышение эффективности, а также проверочные испытания;
- рециркулировать это этап вывода из эксплуатации и утилизации, который включает восстановление и повторное использование материалов и компонентов.
Смотрите также
- Автомат
- Зубчатая передача
- История техники
- Тяга (механическая)
- Список компаний-производителей механического, электрического и электронного оборудования по выручке
- Механизм (инженерия)
- Механическое преимущество
- Схема автоматизации
- Схема машин
- Power (физика)
- Простые машины
- Технологии
- Виртуальная работа
- Работа (физика)
использованная литература
- ^ а б Ашер, Эбботт Пейсон (1988). История механических изобретений. США: Courier Dover Publications. п. 98. ISBN 978-0-486-25593-4. В архиве из оригинала 18.08.2016.
- ^ Словарь американского наследия, Второе издание для колледжа. Houghton Mifflin Co., 1985.
- ^ "μηχανή" В архиве 2011-06-29 на Wayback Machine, Генри Джордж Лидделл, Роберт Скотт, Греко-английский лексикон, о проекте Персей
- ^ "μῆχος" В архиве 2011-06-29 на Wayback Machine, Генри Джордж Лидделл, Роберт Скотт, Греко-английский лексикон, о проекте Персей
- ^ Оксфордские словари, машина
- ^ Карл фон Лангсдорф (1826) Machinenkunde, цитируется в Рило, Франц (1876 г.). Кинематика машин: Очерки теории машин.. Макмиллан. стр.604.
- ^ Тереза МакГуайр, Свет на священных камнях, в Conn, Marie A .; Тереза Бенедикт МакГуайр (2007). Не высечено в камне: очерки ритуальной памяти, души и общества. Университетское издательство Америки. п. 23. ISBN 978-0-7618-3702-2.
- ^ Датч, Стивен (1999). «Догреческие достижения». Наследие древнего мира. Страница профессора Стива Датча, Univ. Висконсина в Грин-Бей. Получено 13 марта, 2012.
- ^ Мури, Питер Роджер Стюарт (1999). Древние месопотамские материалы и отрасли: археологические свидетельства. Айзенбраунс. ISBN 9781575060422.
- ^ Д.Т. Поттс (2012). Компаньон археологии древнего Ближнего Востока. п. 285.
- ^ а б Paipetis, S.A .; Чеккарелли, Марко (2010). Гений Архимеда - 23 века влияния на математику, науку и инженерию: материалы международной конференции, проходившей в Сиракузах, Италия, 8-10 июня 2010 г.. Springer Science & Business Media. п. 416. ISBN 9789048190911.
- ^ Кларк, Сомерс; Энгельбах, Реджинальд (1990). Древнеегипетское строительство и архитектура. Курьерская Корпорация. С. 86–90. ISBN 9780486264851.
- ^ Файелла, Грэм (2006). Технология Месопотамии. Издательская группа Rosen. п. 27. ISBN 9781404205604.
- ^ Мури, Питер Роджер Стюарт (1999). Древние месопотамские материалы и отрасли: археологические свидетельства. Айзенбраунс. п. 4. ISBN 9781575060422.
- ^ Арнольд, Дитер (1991). Строительство в Египте: каменная кладка фараонов. Издательство Оксфордского университета. п. 71. ISBN 9780195113747.
- ^ Вудс, Майкл; Мэри Б. Вудс (2000). Древние машины: от клинья до водяных колес. США: Книги двадцать первого века. п. 58. ISBN 0-8225-2994-7.
- ^ Мури, Питер Роджер Стюарт (1999). Древние месопотамские материалы и отрасли: археологические свидетельства. Айзенбраунс. п. 4. ISBN 9781575060422.
- ^ Вуд, Майкл (2000). Древние машины: от ворчания до граффити. Миннеаполис, Миннесота: Runestone Press. стр.35, 36. ISBN 0-8225-2996-3.
- ^ Азимов, Исаак (1988), Понимание физики, Нью-Йорк, Нью-Йорк, США: Barnes & Noble, стр. 88, ISBN 978-0-88029-251-1, в архиве из оригинала 18.08.2016.
- ^ а б Чиу, Ю. К. (2010), Введение в историю управления проектами, Делфт: Eburon Academic Publishers, стр. 42, ISBN 978-90-5972-437-2, в архиве из оригинала на 18.08.2016
- ^ Остдиек, Верн; Борд, Дональд (2005). Исследование по физике. Томпсон Брукс / Коул. п. 123. ISBN 978-0-534-49168-0. В архиве из оригинала от 28.05.2013. Получено 2008-05-22.
- ^ Стрижак Виктор; Игорь Пеньков; Тойво Паппель (2004). «Эволюция конструкции, использования и прочностных расчетов винтовой резьбы и резьбовых соединений». HMM2004 Международный симпозиум по истории машин и механизмов. Kluwer Academic издательства. п. 245. ISBN 1-4020-2203-4. В архиве из оригинала от 07.06.2013. Получено 2008-05-21.
- ^ Селин, Хелайн (2013). Энциклопедия истории науки, техники и медицины в незападных культурах. Springer Science & Business Media. п. 282. ISBN 9789401714167.
- ^ Ахмад и Хасан, Дональд Рутледж Хилл (1986). Исламские технологии: иллюстрированная история, п. 54. Издательство Кембриджского университета. ISBN 0-521-42239-6.
- ^ Лукас, Адам (2006), Ветер, вода, работа: древние и средневековые технологии фрезерования, Brill Publishers, стр. 65, ISBN 90-04-14649-0
- ^ Элдридж, Фрэнк (1980). Ветряные машины (2-е изд.). Нью-Йорк: Litton Educational Publishing, Inc., стр.15. ISBN 0-442-26134-9.
- ^ Шеперд, Уильям (2011). Производство электроэнергии с использованием энергии ветра (1-е изд.). Сингапур: World Scientific Publishing Co. Pte. ООО п. 4. ISBN 978-981-4304-13-9.
- ^ Таки ад-Дин и первая паровая турбина, 1551 г. н.э. В архиве 2008-02-18 в Wayback Machine, веб-страница, доступ через Интернет 23 октября 2009 г .; эта веб-страница относится к Ахмад и Хасан (1976), Таки ад-Дин и арабское машиностроение, стр. 34-5, Институт истории арабской науки, Университет Алеппо.
- ^ Ахмад Й. Хасан (1976), Таки ад-Дин и арабское машиностроение, п. 34-35, Институт истории арабской науки, Университет Алеппо
- ^ Лаквете, Анджела (2003). Изобретение хлопкоочистителя: машина и миф в довоенной Америке. Балтимор: Издательство Университета Джона Хопкинса. С. 1–6. ISBN 9780801873942.
- ^ Пейси, Арнольд (1991) [1990]. Технологии в мировой цивилизации: тысячелетняя история (Первое издание MIT Press в мягкой обложке). Кембридж, Массачусетс: MIT Press. С. 23–24.
- ^ Шмолек, Майкл Эндрю (2013). Переосмысление промышленной революции: пять веков перехода от аграрного к промышленному капитализму в Англии. БРИЛЛ. п. 328. ISBN 9789004251793.
Вращающаяся Дженни была в основном адаптацией своего предшественника - прялки.
- ^ Бану Муса (авторы), Дональд Рутледж Хилл (переводчик) (1979), Книга гениальных устройств (Китаб аль-Хиял), Springer, стр. 23–4, ISBN 90-277-0833-9
- ^ Салли Ганчи, Сара Ганчер (2009), Ислам и наука, медицина и технологии, The Rosen Publishing Group, стр.41, ISBN 978-1-4358-5066-8
- ^ Жорж Ифра (2001). Универсальная история вычислений: от Abacus до Quatum Computer, п. 171, Пер. E.F. Harding, John Wiley & Sons, Inc. (см. [1] )
- ^ Хилл, Дональд (1998). Исследования средневековых исламских технологий: от Филона до Аль-Джазари, от Александрии до Дияр Бакра. Ashgate. С. 231–232. ISBN 978-0-86078-606-1.
- ^ Koetsier, Teun (2001), "О предыстории программируемых машин: музыкальные автоматы, ткацкие станки, калькуляторы", Механизм и теория машин, Эльзевьер, 36 (5): 589–603, Дои:10.1016 / S0094-114X (01) 00005-2.
- ^ Капур, Аджай; Карнеги, Дейл; Мерфи, Джим; Лонг, Джейсон (2017). «Громкоговорители по желанию: история электроакустической музыки без использования громкоговорителей». Организованный звук. Издательство Кембриджского университета. 22 (2): 195–205. Дои:10.1017 / S1355771817000103. ISSN 1355-7718.
- ^ Профессор Ноэль Шарки, Программируемый робот XIII века (Архив), Университет Шеффилда.
- ^ «Эпизод 11: Древние роботы», Древние открытия, Исторический канал, получено 2008-09-06
- ^ Говард Р. Тернер (1997), Наука в средневековом исламе: иллюстрированное введение, п. 184, г. Техасский университет Press, ISBN 0-292-78149-0
- ^ Дональд Рутледж Хилл, "Машиностроение на Средневековом Ближнем Востоке", Scientific American, Май 1991 г., стр. 64–9 (ср. Дональд Рутледж Хилл, Машиностроение )
- ^ а б Кребс, Роберт Э. (2004). Новаторские эксперименты, изобретения и открытия средневековья. Издательская группа «Гринвуд». п. 163. ISBN 978-0-313-32433-8. В архиве из оригинала от 28.05.2013. Получено 2008-05-21.
- ^ Стивен, Дональд; Лоуэлл Кардвелл (2001). Колеса, часы и ракеты: история технологий. США: W. W. Norton & Company. С. 85–87. ISBN 978-0-393-32175-3. В архиве из оригинала 18.08.2016.
- ^ Армстронг-Элуври, Брайан (1991). Управление машинами с трением. США: Спрингер. п. 10. ISBN 978-0-7923-9133-3. В архиве из оригинала 18.08.2016.
- ^ Пеннок, Г. Р., Джеймс Ватт (1736-1819), Выдающиеся деятели механики и машиноведения, изд. М. Чеккарелли, Springer, 2007 г., ISBN 978-1-4020-6365-7 (Распечатать) 978-1-4020-6366-4 (Интернет).
- ^ Бек Б., Роджер (1999). Всемирная история: модели взаимодействия. Эванстон, Иллинойс: Макдугал Литтел.
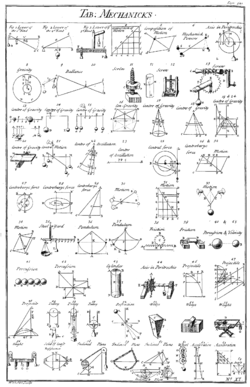
- ^ Чемберс, Ефрем (1728), "Стол механиков", Циклопедия, Полезный словарь искусств и наук, Лондон, Англия, 2, п. 528, плита 11.
- ^ Мун, Ф. К., Коллекция кинематических механизмов Рило в Корнельском университете, 1999 г. В архиве 2015-05-18 в Wayback Machine
- ^ Хартенберг, Р. И Дж. Денавит (1964) Кинематический синтез связей В архиве 2011-05-19 на Wayback Machine, Нью-Йорк: McGraw-Hill, онлайн-ссылка Корнелл Университет.
- ^ а б c Дж. Дж. Уикер, Г. Р. Пеннок и Дж. Э. Шигли, 2003 г., Теория машин и механизмов, Издательство Оксфордского университета, Нью-Йорк.
- ^ "механический". Оксфордский словарь английского языка (Интернет-ред.). Издательство Оксфордского университета. (Подписка или членство участвующего учреждения требуется.)
- ^ Словарь Merriam-Webster Определение слова "механический" В архиве 2011-10-20 на Wayback Machine
- ^ а б Рило, Ф., 1876 г. Кинематика машин В архиве 2013-06-02 в Wayback Machine (пер. и аннотированный А. Б. Кеннеди), перепечатано Дувром, Нью-Йорк (1963)
- ^ Дж. М. Маккарти и Г. С. Со, 2010 г., Геометрический дизайн связей, В архиве 2016-08-19 в Wayback Machine Спрингер, Нью-Йорк.
- ^ "Двигатель внутреннего сгорания", Краткая энциклопедия науки и технологий, Третье издание, Сибил П. Паркер, изд. McGraw-Hill, Inc., 1994, стр. 998.
- ^ Дж. Дж. Уикер, Г. Р. Пеннок и Дж. Э. Шигли, 2003 г., Теория машин и механизмов, Издательство Оксфордского университета, Нью-Йорк.
- ^ Роберт Л. Нортон, Дизайн машин, (4-е издание), Прентис-Холл, 2010 г.
- ^ Сатир, Питер; Сорен Т. Кристенсен (26 марта 2008 г.). «Строение и функции ресничек млекопитающих». Гистохимия и клеточная биология. 129 (6): 687–93. Дои:10.1007 / s00418-008-0416-9. ЧВК 2386530. PMID 18365235. 1432-119Х.
- ^ Кинбара, Казуши; Аида, Такудзо (01.04.2005). «К интеллектуальным молекулярным машинам: направленные движения биологических и искусственных молекул и сборок». Химические обзоры. 105 (4): 1377–1400. Дои:10.1021 / cr030071r. ISSN 0009-2665. PMID 15826015.
- ^ Bu Z, Callaway DJ (2011). «Белки ДВИГАЮТСЯ! Динамика белков и дальняя аллостерия в передаче сигналов в клетке». Структура белка и заболевания. Достижения в химии белков и структурной биологии. 83. С. 163–221. Дои:10.1016 / B978-0-12-381262-9.00005-7. ISBN 9780123812629. PMID 21570668.
- ^ Маррас, А., Чжоу, Л., Су, Х., и Кастро, С.Э. Программируемое движение механизмов оригами ДНК, Труды Национальной академии наук, 2015 В архиве 2017-08-04 в Wayback Machine
- ^ Маккарти, К., Механизмы и машины оригами ДНК | Механический дизайн 101, 2014 В архиве 2017-09-18 в Wayback Machine
- ^ Джером (1934) дает отраслевую классификацию станков как «кроме ручных». Начиная с переписи населения США 1900 года, использование энергии было частью определения фабрики, что отличает ее от мастерской.
- ^ "Бюро патентов и товарных знаков США, Патент № 40891, Игрушечный автомат". Патенты Google. Получено 2007-01-07.
- ^ А. П. Ашер, 1929 г., История механических изобретений В архиве 2013-06-02 в Wayback Machine, Издательство Гарвардского университета (перепечатано Dover Publications, 1968 г.).
- ^ Б. Пол, Кинематика и динамика плоских машин, Прентис-Холл, Нью-Джерси, 1979
- ^ Л. В. Цай, Анализ роботов: механика последовательных и параллельных манипуляторов, John-Wiley, NY, 1999.
дальнейшее чтение
- Оберг, Эрик; Франклин Д. Джонс; Холбрук Л. Хортон; Генри Х. Райффель (2000). Кристофер Дж. Макколи; Риккардо Хилд; Мухаммед Икбал Хуссейн (ред.). Справочник по машинам (26-е изд.). Нью-Йорк: Industrial Press Inc. ISBN 978-0-8311-2635-3.
- Рило, Франц (1876 г.). Кинематика машин. Пер. и аннотировано А. Б. У. Кеннеди. Нью-Йорк: перепечатано Dover (1963).
- Uicker, J. J .; Г. Р. Пеннок; Дж. Э. Шигли (2003). Теория машин и механизмов. Нью-Йорк: Издательство Оксфордского университета.
- Оберг, Эрик; Франклин Д. Джонс; Холбрук Л. Хортон; Генри Х. Райффель (2000). Кристофер Дж. Макколи; Риккардо Хилд; Мухаммед Икбал Хуссейн (ред.). Справочник по машинам (30-е изд.). Нью-Йорк: Industrial Press Inc. ISBN 9780831130992.
внешние ссылки
 СМИ, связанные с Машины в Wikimedia Commons
СМИ, связанные с Машины в Wikimedia Commons Котировки, связанные с Машина в Wikiquote
Котировки, связанные с Машина в Wikiquote- Коллекция механизмов и машин Рило в Корнельском университете

| Классические простые станки |  | |
|---|---|---|
| Часы | ||
| Компрессоры и насосы | ||
| Двигатели внешнего сгорания | ||
| Двигатель внутреннего сгорания | ||
| Связи | ||
| Турбина | ||
| Аэрофойл | ||
| Электроника | ||
| Транспортные средства | ||
| Разное | ||
| Авторитетный контроль |
|---|