Теория управления - Control theory
Теория управления имеет дело с контролем динамические системы в инженерных процессах и машинах. Цель состоит в том, чтобы разработать модель управления для управления такими системами с использованием управляющего воздействия оптимальным образом без задержка или превышение и обеспечение контроля стабильность.
Для этого контролер с необходимым корректирующим поведением. Этот контроллер контролирует регулируемую переменную процесса (PV) и сравнивает ее с опорным или заданным значением (SP). Разница между фактическим и желаемым значением переменной процесса, называемая ошибка сигнал, или ошибка SP-PV, применяется в качестве обратной связи для генерации управляющего воздействия для приведения регулируемой переменной процесса к тому же значению, что и заданное значение. Другие аспекты, которые также изучаются: управляемость и наблюдаемость. Это основа для передового типа автоматизации, который произвел революцию в производстве, авиастроении, связи и других отраслях. Это контроль обратной связи, что предполагает проведение измерений с помощью датчик и внесение расчетных корректировок для удержания измеряемой переменной в пределах установленного диапазона с помощью «конечного элемента управления», такого как регулирующий вентиль.[1]
Широко используется стиль диаграмм, известный как блок-схема. В нем функция передачи, также известная как системная функция или сетевая функция, представляет собой математическую модель отношения между входом и выходом на основе дифференциальные уравнения описание системы.
Теория управления восходит к XIX веку, когда теоретические основы работы губернаторов были впервые описаны Джеймс Клерк Максвелл.[2] Теория управления получила дальнейшее развитие Эдвард Раут в 1874 г., Чарльз Штурм и в 1895 г. Адольф Гурвиц, все они способствовали установлению критериев устойчивости управления; а с 1922 г. разработка ПИД-регулирование теория Николас Минорский.[3]Хотя основное применение математический теория управления находится в разработка систем управления, который занимается дизайном контроль над процессом системы для промышленности, другие приложения выходят далеко за рамки этого. Как общая теория систем с обратной связью, теория управления полезна везде, где возникает обратная связь - таким образом, теория управления также имеет приложения в науках о жизни, компьютерной инженерии, социологии и исследованиях операций.[4]
История

Хотя системы управления различных типов восходят к глубокой древности, более формальный анализ в этой области начался с анализа динамики центробежный регулятор, проведенный физиком Джеймс Клерк Максвелл в 1868 г. под названием О губернаторах.[5] Центробежный регулятор уже использовался для регулирования скорости ветряных мельниц.[6] Максвелл описал и проанализировал феномен автоколебание, при котором лаги в системе могут привести к чрезмерной компенсации и нестабильному поведению. Это вызвало всплеск интереса к теме, во время которого одноклассник Максвелла, Эдвард Джон Раут, обобщил результаты Максвелла для общего класса линейных систем.[7] Независимо, Адольф Гурвиц проанализировал устойчивость системы с помощью дифференциальных уравнений в 1877 году, в результате чего получилось то, что сейчас известно как Теорема Рауса – Гурвица.[8][9]
Заметное применение динамического управления было в области пилотируемых полетов. В Братья Райт совершили свои первые успешные испытательные полеты 17 декабря 1903 года и отличались своей способностью контролировать свои полеты в течение значительных периодов времени (больше, чем способность создавать подъемную силу с аэродинамического профиля, что было известно). Для полетов продолжительностью более нескольких секунд требовалось постоянное и надежное управление самолетом.
К Вторая Мировая Война, теория управления становилась важной областью исследований. Ирмгард Флюгге-Лотц разработал теорию разрывных систем автоматического управления, применил принцип взрыва к развитию аппаратура автоматического управления полетом для самолетов.[10][11] Включены другие области применения прерывистого контроля системы управления огнем, системы наведения и электроника.
Иногда для повышения стабильности систем используются механические методы. Например, стабилизаторы корабля это плавники, установленные под ватерлинией и выходящие сбоку. На современных судах это могут быть активные плавники с гироскопическим управлением, которые могут изменять угол атаки, чтобы противодействовать крену, вызываемому ветром или волнами, действующими на корабль.
В Космическая гонка также зависит от точного управления космическими аппаратами, и теория управления также нашла все более широкое применение в таких областях, как экономика и искусственный интеллект. Здесь можно сказать, что цель - найти внутренняя модель что подчиняется теорема о хорошем регуляторе. Так, например, в экономике, чем точнее модель торговли (акциями или товарами) представляет действия рынка, тем легче она может контролировать этот рынок (и извлекать из него «полезную работу» (прибыль)). В ИИ примером может быть чат-бот, моделирующий состояние дискурса людей: чем точнее он может моделировать состояние человека (например, на горячей линии телефонной голосовой поддержки), тем лучше он может манипулировать человеком (например, выполнять корректирующие действия). для решения проблемы, вызвавшей звонок в службу поддержки). Эти последние два примера используют узкую историческую интерпретацию теории управления как набора дифференциальных уравнений, моделирующих и регулирующих кинетическое движение, и расширяют ее до обширного обобщения теории управления. регулятор взаимодействуя с растение.
Управление с обратной связью и с обратной связью

По сути, существует два типа контуров управления: управление без обратной связи и управление с обратной связью.
При управлении без обратной связи управляющее действие контроллера не зависит от «выхода процесса» (или «регулируемой переменной процесса» - PV). Хорошим примером этого является котел центрального отопления, управляемый только таймером, так что тепло подается в течение постоянного времени, независимо от температуры в здании. Управляющее действие - это включение / выключение котла по времени, переменной процесса является температура в здании, но ни одна из них не связана.
При управлении с обратной связью управляющее воздействие от контроллера зависит от обратной связи от процесса в виде значения переменной процесса (PV). В случае аналогии с котлом, замкнутый контур будет включать термостат для сравнения температуры в здании (PV) с температурой, установленной на термостате (уставка - SP). Это генерирует выходной сигнал контроллера для поддержания заданной температуры в здании путем включения и выключения котла. Таким образом, контроллер с обратной связью имеет контур обратной связи, который гарантирует, что контроллер применяет управляющее действие, чтобы манипулировать переменной процесса, чтобы она была такой же, как «эталонный вход» или «уставка». По этой причине контроллеры с обратной связью также называют контроллерами обратной связи.[12]
Определение системы управления с обратной связью в соответствии с Британским институтом стандартов - это «система управления, обладающая контрольной обратной связью, при этом сигнал отклонения, сформированный в результате этой обратной связи, используется для управления действием конечного элемента управления таким образом, чтобы стремятся уменьшить отклонение до нуля ». [13]
Так же; "А Система управления обратной связью - это система, которая стремится поддерживать заданное отношение одной системной переменной к другой путем сравнения функций этих переменных и использования разницы в качестве средства контроля ».[14]
Другие примеры
Примером системы управления является автомобильный круиз-контроль, который представляет собой устройство, предназначенное для поддержания скорости автомобиля на постоянной желанный или же ссылка скорость, предоставленная водителем. В контролер круиз-контроль, растение это машина, а система это машина и круиз-контроль. Выходной сигнал системы - это скорость автомобиля, а сам контроль - это двигатель. дроссель положение, определяющее мощность двигателя.
Примитивный способ реализовать круиз-контроль - просто заблокировать положение дроссельной заслонки, когда водитель включает круиз-контроль. Однако, если круиз-контроль включен на участке неровной дороги, автомобиль будет двигаться медленнее при подъеме и быстрее при спуске. Этот тип контроллера называется контроллер без обратной связи потому что нет Обратная связь; никакие измерения выходной мощности системы (скорости автомобиля) не используются для изменения управления (положения дроссельной заслонки). В результате контроллер не может компенсировать изменения, воздействующие на автомобиль, например, изменение уклона дороги.
В система управления с обратной связью данные от датчика, контролирующего скорость автомобиля (выходной сигнал системы), поступают в контроллер, который непрерывно сравнивает величину, представляющую скорость, с эталонной величиной, представляющей желаемую скорость. Разница, называемая ошибкой, определяет положение дроссельной заслонки (управление). Результатом является соответствие скорости автомобиля эталонной скорости (поддержание желаемой выходной мощности системы). Теперь, когда автомобиль едет в гору, разница между входным сигналом (измеренной скоростью) и заданным значением постоянно определяет положение дроссельной заслонки. Когда измеренная скорость падает ниже заданной, разница увеличивается, дроссельная заслонка открывается, и мощность двигателя увеличивается, ускоряя транспортное средство. Таким образом, контроллер динамически противодействует изменениям скорости автомобиля. Центральная идея этих систем управления - Обратная связь, контроллер влияет на выходной сигнал системы, который, в свою очередь, измеряется и передается обратно в контроллер.
Классическая теория управления
Чтобы преодолеть ограничения контроллер без обратной связи, теория управления вводит Обратная связь.A регулятор с обратной связью использует обратную связь для управления состояния или же выходы из динамическая система. Его название происходит от информационного пути в системе: входы процесса (например, Напряжение применяется к электрический двигатель ) влияют на выходные параметры процесса (например, скорость или крутящий момент двигателя), которые измеряются с помощью датчики и обрабатывается контролером; результат (управляющий сигнал) "возвращается" как вход в процесс, замыкая цикл.
Контроллеры с обратной связью имеют следующие преимущества перед контроллеры без обратной связи:
- подавление помех (например, холмы в приведенном выше примере круиз-контроля)
- гарантированная производительность даже с модель неопределенности, когда структура модели не полностью соответствует реальному процессу, а параметры модели неточны
- неустойчивый процессы могут быть стабилизированы
- пониженная чувствительность к изменениям параметров
- улучшенная производительность отслеживания ссылок
В некоторых системах управление с обратной связью и без обратной связи используется одновременно. В таких системах управление без обратной связи называется прямая связь и служит для дальнейшего повышения эффективности отслеживания ссылок.
Распространенной архитектурой контроллера с обратной связью является ПИД-регулятор.
Передаточная функция с обратной связью
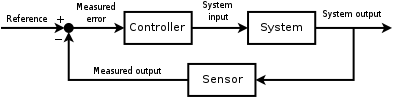
Выход системы у (т) возвращается через измерение датчика F к сравнению с эталонным значением г (т). Контроллер C затем принимает ошибку е (разница) между ссылкой и выходом для изменения входов ты к системе под контролем п. Это показано на рисунке. Этот тип контроллера представляет собой контроллер с обратной связью или контроллер с обратной связью.
Это называется режимом с одним входом и одним выходом (SISO) система контроля; MIMO (т. е. системы с несколькими входами и выходами) с более чем одним входом / выходом являются обычными. В таких случаях переменные представлены через векторов вместо простого скаляр значения. Для некоторых системы с распределенными параметрами векторы могут быть бесконечными -размерный (обычно функции).

Если предположить, что контроллер C, завод п, а датчик F находятся линейный и неизменный во времени (т.е. элементы их функция передачи C (s), P (s), и F (s) не зависят от времени), указанные выше системы можно проанализировать с помощью Преобразование Лапласа от переменных. Это дает следующие отношения:



Решение для Y(s) с точки зрения р(s) дает

Выражение называется передаточная функция с обратной связью системы. В числителе указано прямое усиление (без обратной связи) от р к у, а знаменатель равен единице плюс усиление при обходе контура обратной связи, так называемое усиление контура. Если , т. е. имеет большой норма с каждым значением s, и если , тогда Д (с) примерно равно R (s) а выход точно соответствует эталонному входу.



ПИД-регулирование с обратной связью

Пропорционально-интегрально-производный регулятор (ПИД-регулятор) представляет собой контур управления механизм обратной связи техника управления, широко применяемая в системах управления.
ПИД-регулятор постоянно вычисляет значение ошибки как разница между желаемым уставка и размеренный переменная процесса и применяет поправку на основе пропорциональный, интеграл, и производная термины. PID это инициализм для Пропорционально-интегрально-производная, ссылаясь на три члена, оперирующие сигналом ошибки для создания управляющего сигнала.

Теоретическое понимание и применение восходят к 1920-м годам, и они реализованы почти во всех аналоговых системах управления; первоначально в механических контроллерах, затем с использованием дискретной электроники, а затем и в промышленных компьютерах. ПИД-регулятор, вероятно, является наиболее часто используемой схемой управления с обратной связью.
Если u (t) это управляющий сигнал, отправленный в систему, у (т) - измеренный выход и г (т) - желаемый результат, а ошибка слежения, ПИД-регулятор имеет общий вид


Желаемая динамика замкнутого контура достигается путем настройки трех параметров , и , часто итеративно путем «настройки» и без специальных знаний модели объекта. Стабильность часто можно обеспечить, используя только пропорциональный член. Интегральный член позволяет исключить ступенчатое возмущение (часто яркое уточнение в контроль над процессом ). Термин производная используется для демпфирования или формирования отклика. ПИД-регуляторы являются наиболее устоявшимся классом систем управления: однако они не могут использоваться в нескольких более сложных случаях, особенно если MIMO системы рассмотрены.



Применение Преобразование Лапласа приводит к преобразованному уравнению ПИД-регулятора


с передаточной функцией ПИД-регулятора

Как пример настройки ПИД-регулятора в замкнутой системе , рассмотрим растение 1-го порядка, данное


куда и некоторые константы. Продукция завода возвращается через



куда также является константой. Теперь, если мы установим , , и , мы можем выразить передаточную функцию ПИД-регулятора в последовательной форме как





Подключение , , и в передаточную функцию с обратной связью , мы находим это, полагая




. При такой настройке в этом примере выходной сигнал системы точно соответствует входному заданию.

Однако на практике чистый дифференциатор не является ни физически реализуемым, ни желательным.[15] за счет усиления шумовых и резонансных мод в системе. Следовательно, фазовый компенсатор Вместо этого используется типовой подход или дифференциатор со спадом низких частот.
Линейная и нелинейная теория управления
Теорию управления можно разделить на две части:
- Теория линейного управления - Это относится к системам, состоящим из устройств, соответствующих требованиям принцип суперпозиции, что примерно означает, что выход пропорционален входу. Они регулируются линейный дифференциальные уравнения. Основным подклассом являются системы, которые, кроме того, имеют параметры, не меняющиеся со временем, называемые линейный инвариант во времени (LTI) системы. Эти системы поддаются мощным частотная область математические методы очень общего характера, такие как Преобразование Лапласа, преобразование Фурье, Z преобразование, Сюжет Боде, корневой локус, и Критерий устойчивости Найквиста. Это приводит к описанию системы с использованием таких терминов, как пропускная способность, частотный отклик, собственные значения, прирост, резонансные частоты, нули и полюсы, которые предоставляют решения для отклика системы и методы проектирования для большинства интересующих систем.
- Нелинейная теория управления - Это охватывает более широкий класс систем, которые не подчиняются принципу суперпозиции, и применяется к большему количеству реальных систем, поскольку все реальные системы управления нелинейны. Эти системы часто регулируются нелинейные дифференциальные уравнения. Немногочисленные математические методы, которые были разработаны для их решения, более сложны и гораздо менее общие, часто применимы только к узким категориям систем. К ним относятся предельный цикл теория Карты Пуанкаре, Теорема Ляпунова об устойчивости, и описание функций. Нелинейные системы часто анализируются с использованием численные методы на компьютерах, например моделирование их работа с использованием язык моделирования. Если интерес представляют только решения вблизи устойчивой точки, нелинейные системы часто могут быть линеаризованный аппроксимируя их линейной системой, используя теория возмущений, и можно использовать линейные методы.[16]
Методы анализа - частотная и временная области
Математические методы анализа и проектирования систем управления делятся на две разные категории:
- Частотный диапазон - В этом типе значения переменные состояния математическая переменные представляющие вход, выход и обратную связь системы, представлены как функции частота. Входной сигнал и системные функция передачи преобразуются из функций времени в функции частоты с помощью преобразовать такой как преобразование Фурье, Преобразование Лапласа, или же Z преобразование. Преимущество этого метода в том, что он приводит к упрощению математики; то дифференциальные уравнения представляющие систему заменяются на алгебраические уравнения в частотной области, которую гораздо проще решить. Однако методы частотной области могут использоваться только с линейными системами, как упоминалось выше.
- Представление пространства состояний во временной области - В этом типе значения переменные состояния представлены как функции времени. В этой модели анализируемая система представлена одним или несколькими дифференциальные уравнения. Поскольку методы частотной области ограничены линейный систем, временная область широко используется для анализа реальных нелинейных систем. Хотя их сложнее решить, современные методы компьютерного моделирования, такие как языки моделирования сделали свой анализ рутинным.
В отличие от анализа частотной области классической теории управления, современная теория управления использует временную область пространство состояний представление, математическая модель физической системы в виде набора входных, выходных и переменных состояния, связанных дифференциальными уравнениями первого порядка. Чтобы абстрагироваться от количества входов, выходов и состояний, переменные выражаются в виде векторов, а дифференциальные и алгебраические уравнения записываются в матричной форме (последнее возможно только тогда, когда динамическая система является линейной). Представление в пространстве состояний (также известное как «подход во временной области») обеспечивает удобный и компактный способ моделирования и анализа систем с несколькими входами и выходами. Что касается входов и выходов, в противном случае нам пришлось бы записывать преобразования Лапласа для кодирования всей информации о системе. В отличие от подхода в частотной области, использование представления в пространстве состояний не ограничивается системами с линейными компонентами и нулевыми начальными условиями. «Пространство состояний» относится к пространству, оси которого являются переменными состояния. Состояние системы можно представить как точку в этом пространстве.[17][18]
Системный интерфейс - SISO & MIMO
Системы управления можно разделить на разные категории в зависимости от количества входов и выходов.
- Один вход один выход (SISO) - это самый простой и распространенный тип, в котором один выход управляется одним управляющим сигналом. Примерами являются приведенный выше пример круиз-контроля или аудио система, в котором вход управления - это входной аудиосигнал, а выход - звуковые волны из динамика.
- Множественный вход, множественный выход (MIMO) - они встречаются в более сложных системах. Например, современные большие телескопы такой как Кек и MMT иметь зеркала, состоящие из множества отдельных сегментов, каждый из которых управляется привод. Форма всего зеркала постоянно регулируется MIMO. активная оптика система управления, использующая входные данные от нескольких датчиков в фокальной плоскости, чтобы компенсировать изменения формы зеркала из-за теплового расширения, сжатия, напряжений при повороте и искажения зеркала. волновой фронт из-за турбулентности в атмосфере. Сложные системы, такие как ядерные реакторы и человек клетки моделируются компьютером как большие системы управления MIMO.
Темы теории управления
Стабильность
В стабильность генерала динамическая система без ввода можно описать с помощью Ляпуновская устойчивость критерии.
- А линейная система называется ограниченный вход ограниченный выход (BIBO) стабильный если его выход останется ограниченный для любого ограниченного входа.
- Стабильность для нелинейные системы которые принимают вход стабильность от входа к состоянию (ISS), который сочетает в себе устойчивость по Ляпунову и понятие, аналогичное устойчивости BIBO.
Для простоты следующие описания сосредоточены на непрерывном и дискретном времени. линейные системы.
Математически это означает, что для устойчивости причинной линейной системы все полюса своего функция передачи должны иметь отрицательные действительные значения, т.е. действительная часть каждого полюса должна быть меньше нуля. Практически говоря, стабильность требует, чтобы комплексные полюса передаточной функции находились
- в открытой левой половине комплексная плоскость для непрерывного времени, когда Преобразование Лапласа используется для получения передаточной функции.
- внутри единичный круг для дискретного времени, когда Z-преобразование используется.
Разница между этими двумя случаями просто связана с традиционным методом построения графиков непрерывного и дискретного времени передаточных функций. Непрерывное преобразование Лапласа находится в Декартовы координаты где ось - действительная ось, а дискретное Z-преобразование - в круговые координаты где ось - действительная ось.


Когда соответствующие условия удовлетворены, система называется асимптотически устойчивый; переменные асимптотически устойчивой системы управления всегда уменьшаются от своего начального значения и не испытывают постоянных колебаний. Постоянные колебания возникают, когда действительная часть полюса точно равна нулю (в случае непрерывного времени) или имеет модуль, равный единице (в случае дискретного времени). Если просто стабильный отклик системы не затухает, не растет с течением времени и не имеет колебаний, то это незначительно стабильный; в этом случае передаточная функция системы имеет неповторяющиеся полюса в начале комплексной плоскости (т.е. их действительная и комплексная составляющие равны нулю в случае непрерывного времени). Колебания присутствуют, когда у полюсов с действительной частью, равной нулю, мнимая часть не равна нулю.
Если рассматриваемая система имеет импульсивный ответ из
![x [n] = 0,5 ^ {n} u [n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3fe9bf89c5cffaf461081935fd41745dc768063)
то Z-преобразование (см. этот пример ), дан кем-то

который имеет полюс в (нуль мнимая часть ). Эта система является BIBO (асимптотически) устойчивой, так как полюс внутри единичный круг.

Однако если импульсная характеристика была
![x [n] = 1,5 ^ {n} u [n]](https://wikimedia.org/api/rest_v1/media/math/render/svg/b769b726a2a55b9fc5e5c8d800187d7715cf84cd)
то Z-преобразование

который имеет полюс в и не является устойчивым по BIBO, поскольку полюс имеет модуль, строго превышающий единицу.

Существует множество инструментов для анализа полюсов системы. К ним относятся графические системы, такие как корневой локус, Графики Боде или Графики Найквиста.
Механические изменения могут сделать оборудование (и системы управления) более стабильными. Моряки добавляют балласт, чтобы улучшить остойчивость кораблей. Круизные лайнеры используют стабилизаторы поперечной устойчивости которые простираются в поперечном направлении от борта корабля примерно на 30 футов (10 м) и непрерывно вращаются вокруг своих осей для создания сил, противодействующих качению.
Управляемость и наблюдаемость
Управляемость и наблюдаемость являются основными проблемами при анализе системы до принятия решения о том, какую стратегию управления лучше всего применить, или можно ли вообще контролировать или стабилизировать систему. Управляемость связана с возможностью принудительного перевода системы в определенное состояние с помощью соответствующего управляющего сигнала. Если состояние неуправляемо, то никакой сигнал никогда не сможет управлять состоянием. Если состояние неконтролируемое, но его динамика устойчива, то состояние называется стабилизируемый. Вместо этого наблюдаемость связана с возможностью наблюдениечерез выходные измерения состояние системы. Если состояние ненаблюдаемое, контроллер никогда не сможет определить поведение ненаблюдаемого состояния и, следовательно, не сможет использовать его для стабилизации системы. Однако, как и в случае с условием стабилизируемости, описанным выше, если состояние не может быть обнаружено, оно может быть обнаружено.
С геометрической точки зрения, глядя на состояния каждой переменной системы, которую нужно контролировать, каждое «плохое» состояние этих переменных должно быть управляемым и наблюдаемым, чтобы гарантировать хорошее поведение в замкнутой системе. То есть, если один из собственные значения системы не является одновременно управляемым и наблюдаемым, эта часть динамики останется нетронутой в замкнутой системе. Если такое собственное значение нестабильно, динамика этого собственного значения будет присутствовать в замкнутой системе, которая, следовательно, будет нестабильной. Ненаблюдаемые полюсы не присутствуют в реализации передаточной функции представления в пространстве состояний, поэтому иногда последнее предпочтение отдается при анализе динамических систем.
Решение проблем, связанных с неуправляемой или ненаблюдаемой системой, включает добавление исполнительных механизмов и датчиков.
Спецификация управления
За последние годы было разработано несколько различных стратегий контроля. Они варьируются от очень общих (ПИД-регулятор) до других, посвященных очень конкретным классам систем (особенно робототехника или круиз-контроль самолета).
Проблема управления может иметь несколько характеристик. Стабильность, конечно, присутствует всегда. Контроллер должен обеспечивать стабильность замкнутой системы независимо от стабильности разомкнутого контура. Плохой выбор контроллера может даже ухудшить стабильность системы без обратной связи, чего обычно следует избегать. Иногда желательно получить определенную динамику в замкнутом контуре: т.е. чтобы полюса имели , куда является фиксированным значением, строго большим нуля, вместо того, чтобы просто спрашивать, что .
![Re [лямбда] <- {overline {lambda}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/acd3c480f7bd6fa14fd42e56521994a3b4ad8e2d)

![Re [лямбда] <0](https://wikimedia.org/api/rest_v1/media/math/render/svg/57bd3912e4d0e7aafac442e28a10f4748da7b90d)
Еще одна типичная спецификация - отказ от ступенчатого возмущения; включая интегратор в разомкнутой цепи (т.е. непосредственно перед управляемой системой) легко достигает этого. Другие классы нарушений требуют включения других типов подсистем.
Другие "классические" спецификации теории управления относятся к временной реакции замкнутой системы. К ним относятся время нарастания (время, необходимое системе управления для достижения желаемого значения после возмущения), пик превышение (максимальное значение, полученное ответом до достижения желаемого значения) и другие (время установления, четверть распада). Спецификации частотной области обычно связаны с надежность (см. после).
Современные оценки производительности используют некоторые вариации интегрированной ошибки отслеживания (IAE, ISA, CQI).
Идентификация модели и надежность
Система управления всегда должна обладать некоторым свойством устойчивости. А надежный контроллер такова, что его свойства не сильно меняются, если применить его к системе, немного отличной от математической, используемой для ее синтеза. Это требование важно, поскольку ни одна реальная физическая система не ведет себя так, как серия дифференциальных уравнений, используемых для ее математического представления. Обычно для упрощения расчетов выбирается более простая математическая модель, в противном случае реальная динамика системы может быть настолько сложной, что полная модель станет невозможной.
- Идентификация системы
Процесс определения уравнений, управляющих динамикой модели, называется идентификация системы. Это можно сделать в автономном режиме: например, выполнив серию измерений, на основе которых можно рассчитать приближенную математическую модель, обычно ее функция передачи или матрица. Однако такая идентификация по выходным данным не может учитывать ненаблюдаемую динамику. Иногда модель строят непосредственно исходя из известных физических уравнений, например, в случае масса-пружина-демпфер система мы знаем что . Даже если предположить, что при проектировании контроллера используется «полная» модель, все параметры, включенные в эти уравнения (называемые «номинальными параметрами»), никогда не известны с абсолютной точностью; система управления должна будет вести себя правильно, даже если она подключена к физической системе с истинными значениями параметров, отличными от номинальных.

Некоторые передовые методы контроля включают в себя процесс идентификации «в режиме онлайн» (см. Ниже). Параметры модели рассчитываются («идентифицируются») во время работы самого контроллера. Таким образом, если происходит резкое изменение параметров, например, если рука робота отпускает груз, контроллер, соответственно, сам настраивается, чтобы гарантировать правильную работу.
- Анализ
Анализ устойчивости системы управления SISO (один вход - один выход) может быть выполнен в частотной области, учитывая передаточную функцию системы и используя Найквист и Диаграммы Боде. Темы включают запас по усилению и фазе и запас по амплитуде. Для MIMO (несколько входов и выходов) и, в целом, более сложных систем управления необходимо учитывать теоретические результаты, разработанные для каждого метода управления (см. Следующий раздел). То есть, если требуются особые качества устойчивости, инженер должен переключить свое внимание на метод управления, включив их в его свойства.
- Ограничения
Особая проблема устойчивости - это требование, чтобы система управления работала должным образом при наличии ограничений на ввод и состояние. В физическом мире каждый сигнал ограничен. Может случиться так, что контроллер будет посылать управляющие сигналы, которые не могут быть отслежены физической системой, например, попытка повернуть клапан с чрезмерной скоростью. Это может привести к нежелательному поведению замкнутой системы или даже к повреждению или поломке исполнительных механизмов или других подсистем. Для решения проблемы доступны специальные методы контроля: прогнозирующий контроль модели (см. позже), и антизаводные системы. Последний состоит из дополнительного блока управления, который гарантирует, что управляющий сигнал никогда не превышает заданный порог.
Системные классификации
Управление линейными системами
Для систем MIMO размещение полюса может быть выполнено математически с помощью представление в пространстве состояний разомкнутой системы и расчет матрицы обратной связи, назначающей полюса в желаемых положениях. В сложных системах это может потребовать компьютерных вычислений и не всегда может гарантировать надежность. Кроме того, не все состояния системы обычно измеряются, поэтому наблюдатели должны быть включены в проект размещения столбов.
Управление нелинейными системами
Процессы в таких отраслях, как робототехника и аэрокосмическая промышленность обычно имеют сильную нелинейную динамику. В теории управления иногда можно линеаризовать такие классы систем и применить линейные методы, но во многих случаях может возникнуть необходимость разработать с нуля теории, позволяющие управлять нелинейными системами. Эти, например, линеаризация обратной связи, отступление, управление скользящим режимом, управление линеаризацией траектории обычно использует результаты, основанные на Теория Ляпунова. Дифференциальная геометрия широко использовался в качестве инструмента для обобщения хорошо известных концепций линейного управления на нелинейный случай, а также для демонстрации тонкостей, которые делают эту проблему более сложной. Теория управления также использовалась для расшифровки нейронного механизма, который управляет когнитивными состояниями.[19]
Управление децентрализованными системами
Когда система управляется несколькими контроллерами, проблема заключается в децентрализованном управлении. Децентрализация полезна во многих отношениях, например, она помогает системам управления работать на большей географической территории. Агенты в децентрализованных системах управления могут взаимодействовать с помощью каналов связи и координировать свои действия.
Детерминированные и стохастические системы управления
Стохастическая задача управления - это проблема, в которой эволюция переменных состояния подвергается случайным ударам извне системы. Задача детерминированного управления не подвержена внешним случайным шокам.
Основные стратегии контроля
Каждая система управления должна в первую очередь гарантировать стабильность работы замкнутого контура. За линейные системы, это может быть получено путем непосредственного размещения полюсов. нелинейные системы управления используют определенные теории (обычно основанные на Александр Ляпунов Теория), чтобы обеспечить стабильность без учета внутренней динамики системы. Возможность выполнения различных спецификаций зависит от рассматриваемой модели и выбранной стратегии управления.
- Список основных приемов контроля
- Адаптивное управление использует интерактивную идентификацию параметров процесса или изменение коэффициентов усиления контроллера, тем самым получая высокие характеристики устойчивости. Адаптивное управление было применено впервые в аэрокосмическая промышленность в 1950-х годах и добились особого успеха в этой области.
- А иерархическая система управления это тип система контроля в котором набор устройств и управляющего программного обеспечения организован в виде иерархический дерево. Когда ссылки в дереве реализованы компьютерная сеть, то эта иерархическая система управления также является формой сетевая система управления.
- Интеллектуальное управление использует различные вычислительные подходы AI, такие как искусственные нейронные сети, Байесовская вероятность, нечеткая логика,[20] машинное обучение, эволюционные вычисления и генетические алгоритмы или комбинация этих методов, например нервно-нечеткий алгоритмы, чтобы управлять динамическая система.
- Оптимальный контроль представляет собой особый метод управления, в котором управляющий сигнал оптимизирует определенный «индекс стоимости»: например, в случае спутника, реактивные тяги, необходимые для вывода его на желаемую траекторию, которые потребляют наименьшее количество топлива. Два метода проектирования оптимального управления широко используются в промышленных приложениях, поскольку было показано, что они могут гарантировать стабильность с обратной связью. Это Прогностический контроль модели (MPC) и линейно-квадратично-гауссовское управление (LQG). Первый может более явно учитывать ограничения на сигналы в системе, что является важной особенностью многих промышленных процессов. Однако структура «оптимального управления» в MPC - это только средство для достижения такого результата, поскольку она не оптимизирует истинный показатель производительности системы управления с обратной связью. Вместе с ПИД-регуляторами системы MPC являются наиболее широко используемым методом управления в контроль над процессом.
- Надежный контроль прямо имеет дело с неопределенностью в своем подходе к разработке контроллера. Контроллеры, разработанные с использованием надежный контроль методы, как правило, способны справиться с небольшими различиями между реальной системой и номинальной моделью, используемой для проектирования.[21] Ранние методы Боде а другие были довольно крепкими; методы пространства состояний, изобретенные в 1960-х и 1970-х, иногда оказывались недостаточно устойчивыми. Примеры современных методов надежного управления включают: Формирование петли H-бесконечности разработан Дунканом Макфарлейном и Кейт Гловер, Управление скользящим режимом (SMC) разработан Вадим Уткин и безопасные протоколы, предназначенные для управления большими разнородными группами электрических нагрузок в приложениях Smart Power Grid.[22] Надежные методы нацелены на достижение устойчивой производительности и / или стабильность при наличии небольших ошибок моделирования.
- Стохастический контроль имеет дело с дизайном управления с неопределенностью в модели. В типичных задачах стохастического управления предполагается, что в модели и контроллере существуют случайные шумы и возмущения, и при разработке управления эти случайные отклонения должны учитываться.
- Энергетический контроль рассматривайте установку и контроллер как устройства преобразования энергии. Стратегия управления сформулирована в терминах взаимосвязи (с сохранением мощности) для достижения желаемого поведения.
- Самоорганизованный контроль критичности можно определить как попытки вмешательства в процессы, посредством которых самоорганизованный система рассеивает энергию.
Люди в системах и управлении
Многие активные и исторические деятели внесли значительный вклад в теорию управления, в том числе
- Пьер-Симон Лаплас изобрел Z-преобразование в своей работе над теория вероятности, в настоящее время используется для решения задач теории управления с дискретным временем. Z-преобразование является эквивалентом дискретного времени Преобразование Лапласа который назван в его честь.
- Ирмгард Флугге-Лотц разработал теорию прерывистый автоматический контроль и применил его к системы автоматического управления самолетом.
- Александр Ляпунов в 1890-х знаменует собой начало теория устойчивости.
- Гарольд С. Блэк изобрел концепцию усилители отрицательной обратной связи в 1927 году. Ему удалось разработать стабильные усилители с отрицательной обратной связью в 1930-х годах.
- Гарри Найквист разработал Критерий устойчивости Найквиста для систем обратной связи в 1930-е гг.
- Ричард Беллман развитый динамическое программирование с 1940-х гг.[23]
- Андрей Колмогоров совместно разработал Фильтр Винера – Колмогорова в 1941 г.
- Норберт Винер соавтором фильтра Винера – Колмогорова и придумал термин кибернетика в 1940-е гг.
- Джон Р. Рагаццини представил цифровое управление и использование Z-преобразование в теории управления (изобретен Лапласом) в 1950-е годы.
- Лев Понтрягин представил принцип максимума и принцип взрыва.
- Пьер-Луи Лайонс развитый вязкие растворы в стохастический контроль и оптимальный контроль методы.
- Рудольф Кальман был пионером пространство состояний подход к системам и контролю. Введены понятия управляемость и наблюдаемость. Разработал Фильтр Калмана для линейной оценки.
- Али Х. Найфех который был одним из основных авторов теории нелинейного управления и опубликовал множество книг по методам возмущений.
- Ян К. Виллемс Введено понятие диссипативности как обобщение Функция Ляпунова к системам ввода / состояния / вывода. Построение функции запоминания, как называют аналог функции Ляпунова, привело к изучению линейное матричное неравенство (LMI) в теории управления. Он был пионером поведенческого подхода к математической теории систем.
Смотрите также
- Примеры систем управления
- Автоматизация
- Контроллер Deadbeat
- Системы с распределенными параметрами
- Управление дробным порядком
- Формирование петли H-бесконечности
- Иерархическая система управления
- Прогностический контроль модели
- Оптимальный контроль
- Контроль над процессом
- Надежный контроль
- Сервомеханизм
- Пространство состояний (элементы управления)
- Векторное управление
- Темы теории управления
- Метод диаграммы коэффициентов
- Реконфигурация управления
- Теорема вставки сечения
- Обратная связь
- H бесконечность
- Сингулярное значение Ганкеля
- Теорема Кренера
- Компенсатор опережения-запаздывания
- Незначительная обратная связь петли
- Многоконтурная обратная связь
- Положительные системы
- Радиальная базисная функция
- Корневой локус
- Графики потока сигналов
- Стабильный многочлен
- Представление в пространстве состояний
- Устойчивое состояние
- Переходный ответ
- Переходное состояние
- Недоразвитие
- Параметризация Юлы – Кучеры
- Метод аппроксимации цепей Маркова
- Другие связанные темы
- Адаптивная система
- Автоматизация и дистанционное управление
- График облигаций
- Техника управления
- Управление – обратная связь – прерывание цикла
- Контроллер (теория управления)
- Кибернетика
- Интеллектуальное управление
- Математическая теория систем
- Усилитель отрицательной обратной связи
- Люди в системах и управлении
- Теория перцептивного контроля
- Теория систем
- Расчет шкалы времени
Рекомендации
- ^ Беннетт, Стюарт (1992). История техники управления, 1930-1955 гг. ИЭПП. п. 48. ISBN 978-0-86341-299-8.
- ^ Максвелл, Дж. (1868). «О губернаторах» (PDF). Труды Королевского общества. 100.
- ^ Минорский, Николай (1922). «Курсовая устойчивость автоматически управляемых кузовов». Журнал Американского общества морских инженеров. 34 (2): 280–309. Дои:10.1111 / j.1559-3584.1922.tb04958.x.CS1 maint: ref = harv (связь)
- ^ GND. "Katalog der Deutschen Nationalbibliothek (Орган контроля)". portal.dnb.de. Получено 26 апреля, 2020.
- ^ Максвелл, Дж. К. (1868). «О губернаторах». Труды Лондонского королевского общества. 16: 270–283. Дои:10.1098 / rspl.1867.0055. JSTOR 112510.
- ^ Теория управления: история, математические достижения и перспективы | Э. Фернандес-Кара1 и Э. Зуасуа
- ^ Routh, E.J .; Фуллер, А. (1975). Устойчивость движения. Тейлор и Фрэнсис.
- ^ Раус, Э.Дж. (1877 г.). Трактат об устойчивости данного состояния движения, особенно устойчивого движения: особенно устойчивого движения. Macmillan and co.
- ^ Гурвиц, А. (1964). «Об условиях, при которых уравнение имеет только корни с отрицательными действительными частями». Избранные статьи по математическим тенденциям в теории управления.
- ^ Флюгге-Лотц, Ирмгард; Титус, Гарольд А. (октябрь 1962 г.). «Оптимальное и квазиоптимальное управление системами третьего и четвертого порядков» (PDF). Технический отчет Стэнфордского университета (134): 8–12.
- ^ Холлион, Ричард П. (1980). Сичерман, Барбара; Грин, Кэрол Херд; Кантров, Илен; Уокер, Харриетт (ред.). Известные американские женщины: современный период: биографический словарь. Кембридж, штат Массачусетс: Belknap Press of Harvard University Press. стр.241–242. ISBN 9781849722704.
- ^ «Системы обратной связи и управления» - Дж. Дж. Ди Стеффано, А. Р. Стубберуд, И. Дж. Вильямс. Серия набросков Шаумса, Макгроу-Хилл 1967
- ^ Майр, Отто (1970). Истоки управления с обратной связью. Клинтон, Массачусетс, США: The Colonial Press, Inc.
- ^ Майр, Отто (1969). Истоки управления с обратной связью. Клинтон, Массачусетс, США: The Colonial Press, Inc.
- ^ Ang, K.H .; Чонг, G.C.Y .; Ли, Ю. (2005). «Анализ, проектирование и технология систем ПИД-регулирования». IEEE Transactions по технологии систем управления. 13 (4): 559–576. Дои:10.1109 / TCST.2005.847331. S2CID 921620.
- ^ точка обрезки
- ^ Дональд М. Виберг. Пространство состояний и линейные системы. Наброски Шаума. Макгроу Хилл. ISBN 978-0-07-070096-3.
- ^ Террелл, Уильям (1999). «Некоторая фундаментальная теория управления I: управляемость, наблюдаемость и двойственность - И - некоторая фундаментальная теория управления II: линеаризация обратной связи нелинейных систем с одним входом». Американский математический ежемесячный журнал. 106 (9): 705–719 и 812–828. Дои:10.2307/2589614. JSTOR 2589614.
- ^ Гу Ши; и другие. (2015). «Управляемость структурных сетей мозга (артикул 8414)». Nature Communications. 6 (6): 8414. arXiv:1406.5197. Bibcode:2015 НатКо ... 6,84 14 г. Дои:10.1038 / ncomms9414. ЧВК 4600713. PMID 26423222. Сложить резюме.
Здесь мы используем инструменты из теорий контроля и сетевых теорий, чтобы предложить механистическое объяснение того, как мозг перемещается между когнитивными состояниями, взятыми из сетевой организации микроструктуры белого вещества.
- ^ Лю, Цзе; Уилсон Ван; Фарид Голнараги; Эрик Кубица (2010). «Новая нечеткая структура для управления нелинейными системами». Нечеткие множества и системы. 161 (21): 2746–2759. Дои:10.1016 / j.fss.2010.04.009.
- ^ Мелби, Пол; и другие. (2002). «Робастность адаптации в управляемых самонастраивающихся хаотических системах». Буквы флуктуации и шума. 02 (4): L285 – L292. Дои:10.1142 / S0219477502000919.
- ^ Н. А. Синицын. С. Кунду, С. Бакхаус (2013). «Безопасные протоколы для генерации импульсов мощности с гетерогенными совокупностями термостатически контролируемых нагрузок». Преобразование энергии и управление. 67: 297–308. arXiv:1211.0248. Дои:10.1016 / j.enconman.2012.11.021. S2CID 32067734.
- ^ Ричард Беллман (1964). «Теория управления» (PDF). Scientific American. Vol. 211 нет. 3. С. 186–200.
дальнейшее чтение
- Левин, Уильям С., изд. (1996). Справочник по контролю. Нью-Йорк: CRC Press. ISBN 978-0-8493-8570-4.
- Карл Й. Остром; Ричард М. Мюррей (2008). Системы обратной связи: введение для ученых и инженеров (PDF). Издательство Принстонского университета. ISBN 978-0-691-13576-2.
- Кристофер Килиан (2005). Современные технологии управления. Томпсон Делмар Обучение. ISBN 978-1-4018-5806-3.
- Ванневар Буш (1929). Анализ рабочих цепей. John Wiley and Sons, Inc.
- Роберт Ф. Стенгель (1994). Оптимальное управление и оценка. Dover Publications. ISBN 978-0-486-68200-6.
- Франклин; и другие. (2002). Управление с обратной связью динамических систем (4-е изд.). Нью-Джерси: Прентис-Холл. ISBN 978-0-13-032393-4.
- Джозеф Л. Хеллерштейн; Дон М. Тилбери; Суджай Парех (2004). Управление вычислительными системами с обратной связью. Джон Уайли и сыновья. ISBN 978-0-471-26637-2.
- Дидерих Хинрихсен и Энтони Дж. Причард (2005). Теория математических систем I - Моделирование, анализ пространства состояний, устойчивость и надежность. Springer. ISBN 978-3-540-44125-0.
- Андрей, Некулай (2005). «Современная теория управления - историческая перспектива» (PDF). Получено 10 октября, 2007. Цитировать журнал требует
| журнал =(помощь) - Зонтаг, Эдуардо (1998). Математическая теория управления: детерминированные конечномерные системы. Второе издание (PDF). Springer. ISBN 978-0-387-98489-6.
- Гудвин, Грэм (2001). Проектирование системы управления. Прентис Холл. ISBN 978-0-13-958653-8.
- Кристоф Бассо (2012). Проектирование контуров управления для линейных и импульсных источников питания: Учебное руководство. Артек Хаус. ISBN 978-1608075577.
- Борис Дж. Лурье; Пол Дж. Энрайт (2019). Классическое управление с обратной связью с нелинейными многоконтурными системами (3-е изд.). CRC Press. ISBN 978-1-1385-4114-6.
- Для химической инженерии
- Люибен, Уильям (1989). Моделирование процессов, имитация и управление для инженеров-химиков. Макгроу Хилл. ISBN 978-0-07-039159-8.
внешняя ссылка
- Руководства по управлению для Matlab, набор проработанных контрольных примеров, решаемых несколькими различными методами.
- Настройка управления и лучшие практики
- Расширенные структуры управления, бесплатные онлайн-симуляторы, объясняющие теорию управления
- Темная сторона теории петлевого контроля, профессиональный семинар, проведенный в АТЭС в 2012 году (Орландо, Флорида).
| Фонды | |
|---|---|
| Алгебра | |
| Анализ | |
| Дискретный | |
| Геометрия | |
| Теория чисел | |
| Топология | |
| Применяемый | |
| Вычислительная | |
| похожие темы | |
| |